Discussions are now well under way on Scaling Laws in AWES Design.
This topic is about the specific case of a pilot kite, or lifter, as a static and stable kite.
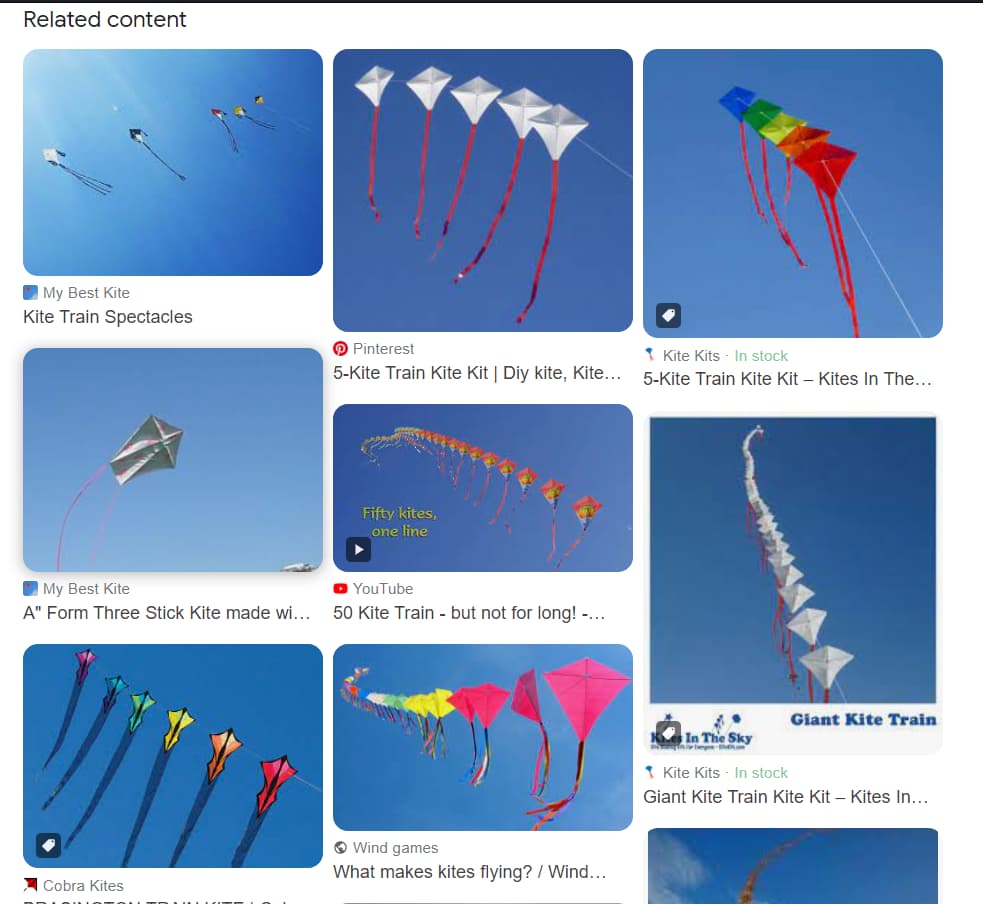
Kite Networks recount numerous stacked kites and rotors compensating the limited size of each element.
I don’t think that stacked kite trains are suitable for crosswind use in AWE efficiency context, as the lower kite will have to fly slower than the upper kite, as the trajectory is reduced.
However, for a pilot (lifting) kite use, a kite train does not have this drawback.
I thought that stacked Sharp rotors would be easier to install. I just realize that some stacked ram kites have be realized, for a playful crosswind steering:
Perhaps more spacing would be required in order to maximize the traction of each unity, although stacked 10.5 cm diameter 50 cm span Sharp rotors spaced to 0.2 m generate almost no thrust loss. And also single skin kites could be implemented. A single tether will be able to relay the set of kites to two lines.
If a high level of stability is realized in spite of wind variations, we can then imagine what would be a super lifting stacked kite system where each unit would be as big as possible, and where the height would be unlimited (no problem of trajectory or transmission). The enormous lift gained would then enable a conventional wind turbine to be lifted or, better still, a lighter Kiwee-type (@Kitewinder) rope-drive driven wind turbine tensioned by the pull of the stacked lifting kite system.
This could be a way to meet the conditions for a marketable AWES: efficient use of high altitude winds, high elevation angle and therefore high power to space ratio.
In these conditions the kites are used to do what they do best: fly and lift; while the on-board wind turbine (with ground generator for optional rope-drive transmission) is also used for what it does best: produce electricity.
Unless the tether length without kites is significantly longer. In addition, the upper kites benefit from generally higher so stronger altitude winds, and could fly faster than the lower ones.
We could also study single line stacked kites if they are self-stable enough, including strategies for takeoff and landing as for the previous ones.
This optimisation route is similar in ways to the investigation (on not stacked kites) by Moritz Diehl Circular AWE Parks with High Ground Area Power Density Where cyclic pitch controlled multi-kite rotors are used for lift (Yo-yo) and controlled to stay spaced apart while operating on multiple levels on the virtual surface of a sloped plane… Somewhat like old Mothra meta-kite but without the cross linking load lines.
Stacking multi line kites makes complications for ground control, launch and recovery handling.
There’s also a problem with stacking a pilot kite like this one Peter Lynn Himself
What I found in testing is that instability creates misalignment between the stacked kites. So then the tight line which runs through the centre of the lower pilots is moving sideways relative to these lower kites. This line pressure inside the lower kites squeezes and exhausts the cells and kills the inflation on at least one side of the lower kite.
The kites typically tend to be small and have fairly rigid cores.
Larger single line kites need protection against misalignment crushing cells.
The line could meet an internal rigid element (frame, inflated beam, walls …) to spread out the side forces.
Side cells might have flap valves to prevent deflation.
Most solutions are going to add complexity, cost, mass.
A solar inflation central cell might help - with central controllers for - parafoil side wings - maybe
How else might we best reinforce the central cell of a single line ram air kite to prevent collapse when the through tether gets pulled sideways ?
It is about a parasail cluster as a giant pilot lifter kite. The cluster could perhaps also be applied to one of the substantially round lifter kites like SSSL which are often used.
On the comment below, I evoked a parasail cluster.
But the numerous reel-out and reel-in phases increase the risk of entanglement:
3 - Potential Entanglement
Parachute lines from different chutes in a cluster can become tangled during deployment. This risk of entanglement can lead to chute malfunctions or failures, particularly in more complex cluster configurations.
To mitigate this risk, engineers must design parachute clusters with mechanisms to prevent entanglement. This may include careful packing of the parachutes, separation systems, or methods to ensure the lines do not cross during deployment. Nevertheless, the potential for entanglement remains a challenge that engineers must address.
However a parasail cluster is maybe a possibility for scaling a pilot kite, not having to undergo the openings alternating with the closings of the parachutes.
Perhaps a parasail (which is round or almost, like any parachute) cluster could lift high loads like large Kiwee-type or Daisy turbines.
This point I quote again is perhaps a positive feature for static kites:
And also, similarly relating to a parachute cluster:
A parachute cluster:
A 19,000-kilogram test of a cluster of eight G-16 parachutes. Credit: U.S. Army
A little test today with a cluster of 4 parachute kites, without their respective bears which play the role of ballast, but with the small ballast included on the edge under the two visible holes located between said edge and the middle.
Although attached to their respective loops located less than 1 m from the top of their respective canopies, they flew in an anarchic manner without climbing and without remaining grouped, a bit like in this test with the common attachment much further away (several meters) and without the intention of grouping them.
This essay is too rudimentary to draw conclusions. However a cluster of parasails (lift+ drag and single position to ensure lift) could be more difficult to control than a cluster of parachutes (only drag, and any position).
 Doug
Doug