Could you describe the dimensions you are thinking of?
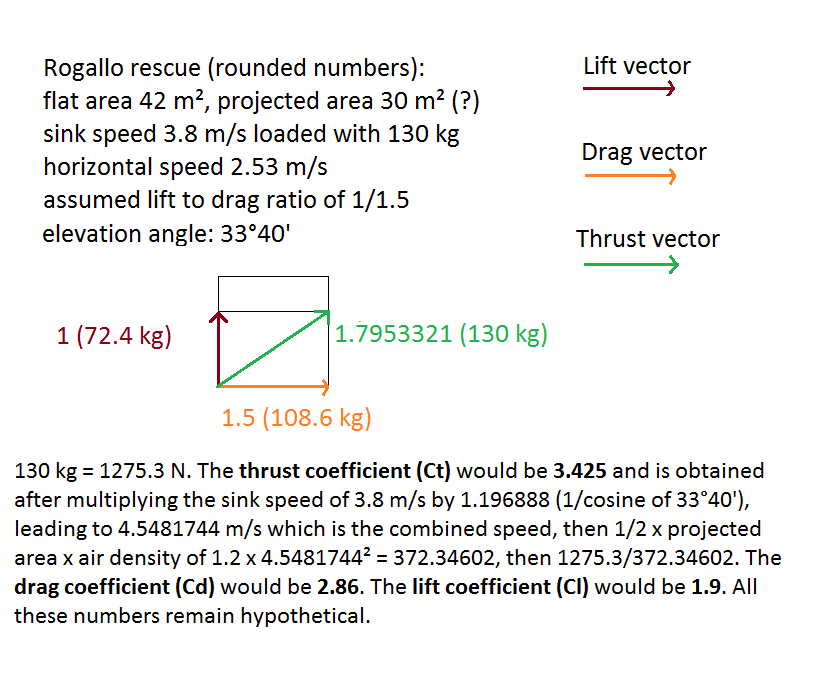
And what is the thrust coefficient Ct?
I find it hard to believe that a drag coefficient of 3.0 is achieveable when a flat plate can get no higher than 2.0. How is the drag coefficient of 3.0 calculated? I know you posted some sources but for me it was not clear still, how they are using the C_D coefficient.
Imagine what the dimensions might be of a completely drag-based kite much like a spinnaker. I think they would be superior to high glide ratio wings, but I’m not sure. And our Rogallo would be intermediate.
In fact I don’t know anything about it: you’ll have to try it and see what happens.
Maybe the distant anchors would be a factor in scalability, but again I’m not sure.
Page 10, the document below mentions “tangential force T (along the axe)”. I prefer the term “thrust” (or also “pull”) which is also sometimes used, combining drag and lift force. The Chinese team uses also the term “thrust” in the Book of Abstracts (AWEC2024), page 37: “To tackle this problem, we numerically investigate the thrust coefficient (Ct)…” From DOI: 10.13140/RG.2.2.32994.13762:
That’s what I thought, but I’ve seen and cited a number of examples with Cd close to 3, including almost all rescue parachutes (obtained by the given sink speed and load, by guessing the projected area from the flat area). A very high Cd leads also to a high Cl even with a modest elevation angle, and I think this is possible due to the very high angle of attack.
I think a huge amount of research has been done to enable rescue parachutes to be compact and lightweight for the benefit of paragliders. The improvements focused on the increase in the Cd which is rarely given by manufacturers as such, but can be deducted.
This is exactly my concern. With a C_t of 3.0 and assuming 12 m/s wind speed and 1/3 downwind reel out, for 1.0 MW you would need 2.1k sqm kite area. If we assume circular shape, 52 m diameter. Maybe minimum tether length for this geometry would be 500 m which would be no problem. To get to 1 km altitude (1.41 km tether at 45 deg elevation) though, would need three tethers each able to withstand the pull 250 kN would have to have a diameter maybe 23 mm. The total mass of those tethers would be maybe 1.8 ton with a gravity force 18 kN.
So a lot for me boils down to: can you ensure a somewhat even tension in all three tethers. If not, it will droop.
Also, can you ensure even tension over a wide range of wind speeds?
Or maybe like I did with «The Pyramid», accept that the tether cant be very long. This is really a matter of where do you want to push the design
I think the dosage of tension, even on just three tethers, would require control taking into account wind directions with different angles, different lengths of tethers depending on angle of attack, and so on.
This is an almost impossible mission unless there is ultra-perfect control software and mechanical means.
But for an AWES shouldn’t control be relayed to essential things when possible?
Suspension lines and bridles converging towards a respective single tether seem to be solutions that work (I experimented the difficulties of several anchors for a parachute-like in contrast to a single-line one), and certainly much more suitable for a yo-yo device.
In the other hand, several anchors could be useful only to preform the kite for takeoff and landing.
The wide spread anchor pattern can help with stability.
It may even help with being able to stack parachutes as the lines go up the outside.
I don’t think a giant single sheet isotropic is something we’re going to see very soon. I suspect it would take a long time to build up to. As you need a lot of control on the relative tether lengths.
I flew a simple arch kite yesterday with multiple little units that works perfectly across wind even when several of the kites have been damaged.
I made some arch kites out of multiple old windsurfer sails. In moderate winds they were easy enough to set. In a strong wind they were dangerous , and could pulse into being filled. flap and vibrate like a giant reed. The shaking would soon break parts near nodes.
Maybe steering the kites can be
easier/safer/less energy/possible
with a central pod taking up some of the tension to deform the overall shape
Big maybe
More complexity
But Not too complex
I think the combination of big max-min tension on the tethers for the giant isotropic kite, coupled with a nimble controller and remote sensing the kite state makes this a very hard to implement system. Sure, you could start to work on a specific design, but its not for me.
Using a control pod would be a nice addition I think. But then the effect of mass in low winds would probably be quite unmanageable… the pod mass would probably be hundreds of kgs…
It seems fairly easy to build though. Four winches, a huge tarp and some software. I think though to get a C_t > 1.5 is hard just with a tarp… You may be looking at a square-bowl like structure with four anchor points. Or maybe triangular?
I am guessing you may also want to combine all tethers in a central differential unit, to balance pull of the tethers.
We remark that due to the large space between the anchors, the tether lengths are not the same upwind and downwind. As a result said tether lengths should vary, requiring the use of a computerized management depending on the wind direction.
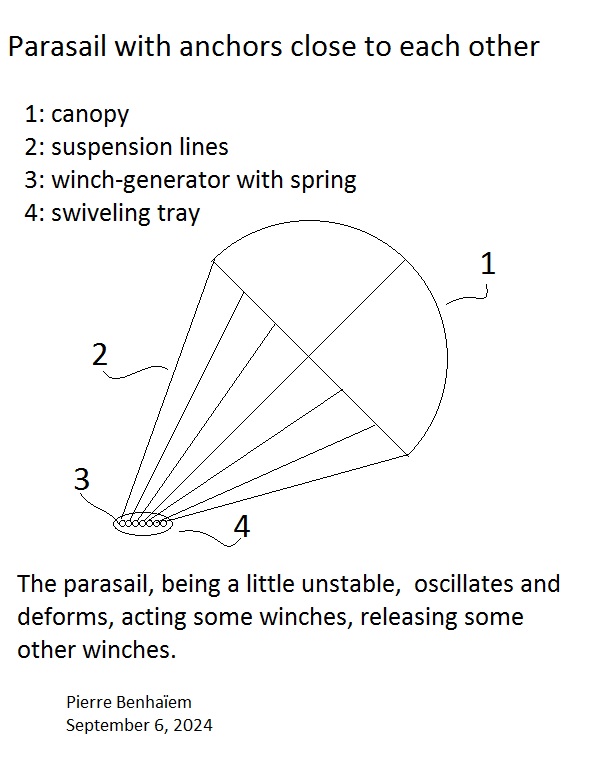
So it can be better that anchors are close to each other in order to avoid the requirement of any control, knowing that the suspension lines around the isotropic or almost isotropic canopy of parachute kite toys or parasails have the same length, the lift being achieved by aerodynamic means such like slots and by ballasts.
Thus anchors are on a small swiveling tray rotating by the forces exerted on the parachute according to the wind direction. The almost isotropic shape goes with an almost round shape, leading to numerous suspension lines allowing to refine the transmission of oscillations and deformations towards respective winches-generators.
The parasail, being a little unstable, oscillates and deforms, acting some winches, releasing some other winches.
Don’t expect a high power, but a fun and easy AWES.
The oscillating parachute that was experimented could be a parasail (which is an almost isotropic kite) in order to fly instead of falling and dragging.
In all configurations the winches with their respective springs are like dog leashes (just like on the photos and the video), and are connected to their respective generators, allowing differentiated recovery phases: by oscillating and deforming, the kite would pull on some of the winches, while releasing other winches.
The experiments today, on 09/09/2024, showed that the described device has no significant potential of power.
The caption of the Figure 2 of the preprint:
This parachute, experimented with the winches on 09/09/2024, although being not a parasail, complies with the present proposition, because the winches (dog leashes) are close together. The 4 ropes were all in tension, just like the ropes of the device on the video on the Figure 1. So no power can occur. And even if the generators had a higher resistive torque, the parachute would have been unbalanced and deflated because of the too great difference in tension between the ropes of the engaged generators (tensioned return spring) and those of the disengaged generators (relaxed return spring ). As a result this AWES is not promising, because it cannot generate significant power.