First of all, I think we need to separate the concept of multi-anchoring from the concept of a very high drag coefficient and a high lift coefficient due to the very high angle of attack, and coming from steerable rescue parachutes and some parasails, for an elevation angle of 30-35 degrees, which is that of an AWES crosswind kite.
Note that even with a low elevation angle, the kite is closer to vertical, which still allows it to access high altitude winds if it is gigantic.
There is a considerable advantage of a Cd greater than 2 and almost 3 for the devices I’ve investigated, notably the reserve parachutes (based on the sink rate and the load), and a thrust coefficient Ct of over 3, which multiplies the power in yo-yo mode by around 3, while the AWES remains tether-aligned, keeping its corridor, unlike a crosswind kite which would have a power/kite area of around 3 times more: don’t forget the losses due to power variations (above all in figure-eight) as the kite moves away from the zone of near-maximum power while consuming a large space area to fly correctly. I calculated that with an elevation angle of 50 degrees or a little more, the Ct of a Rogallo rescue as a kite would be about two times less, becoming almost close to that of the Zhonglu device, although with an autonomous lift instead of the lift by a lifter kite or a balloon at the top.
The depower would be controlled by a central tether, akin to the third line in kitesurfing.
The two concepts can operate independently. Why multi-anchoring? The idea is to move the anchors further apart in order to preform a kite of very large dimensions and to facilitate its take-off and landing, and whose tethers will be relatively short.
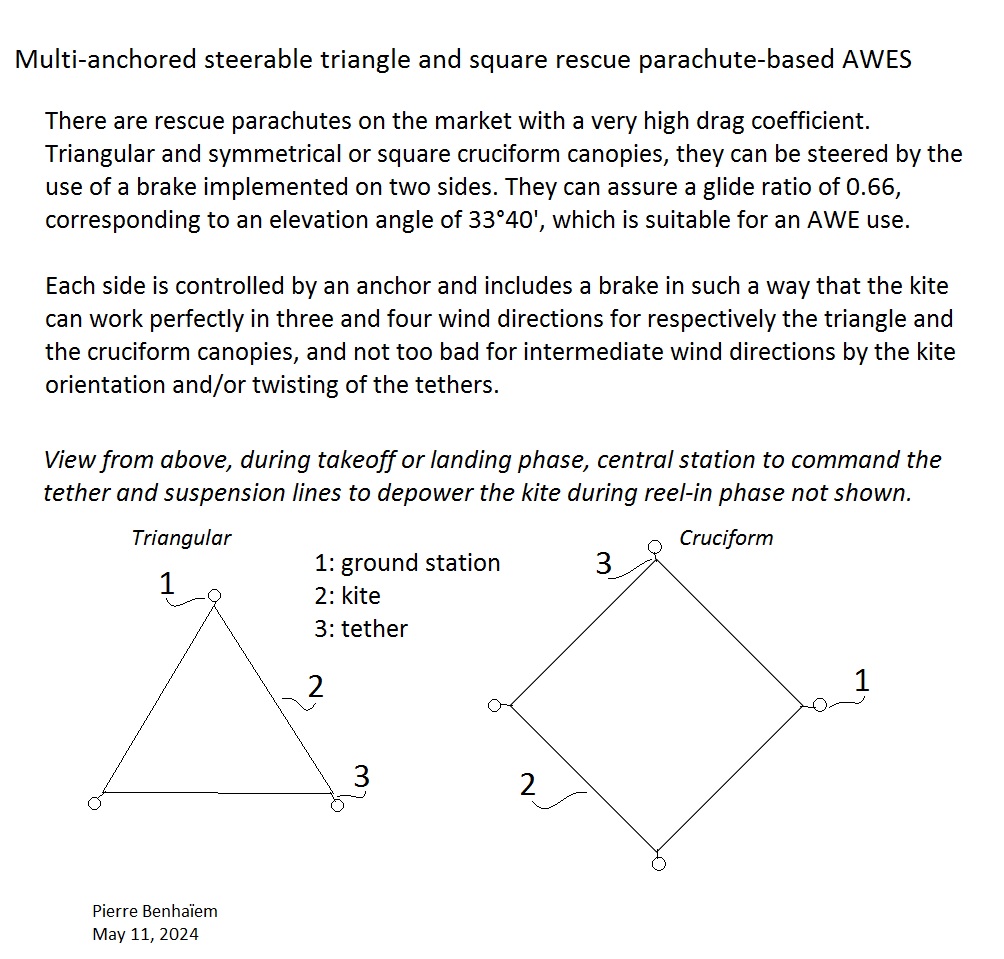
From what I have seen, steerable parachutes can be steered (and therefore extrapolated into kites) using the brakes installed on two opposite sides.
As I indicated, if you want to benefit from winds from more or less all directions, you should implement a brake on each side (3 for a triangle, 4 for a cruciform), then choose two brakes according to the current wind direction. Depower is ensured via a central station controlling the central depower tether.
Of course it can be interesting if gigantic dimensions of the kite can be achieved. Otherwise, it is better to stay on a single line and still benefit from the high coefficients.