Daisy designs (which were mentioned but described poorly in your patent @PierreB ) were the first hollow axis autogyro kite turbine … There was quite a lot of potential configuration presented openly on the old forum as soon as I devised it. As for priority dates yes - Rudy Harburg #1 Doug S#2 My yahoo open work#3. Para-rotor came later. Daisy was the first hollow axis autogyro kite turbine. And quite a lot more besides. Moving on.
Maybe @PierreB you should upgrade to ollies 2nd year review for a discussion on the differences in torque transmission
The analysis you did with Roland figure 22.18 (chapter 22, page 571)
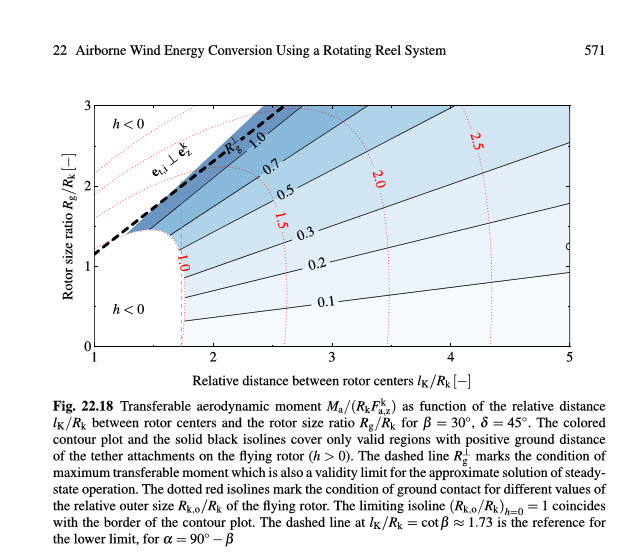
Describes how a single ground plane PTO rotor interacts with a single flying rotor kite autogyro in a single configuration
That’s quite different to a stacked and aligned system analysis
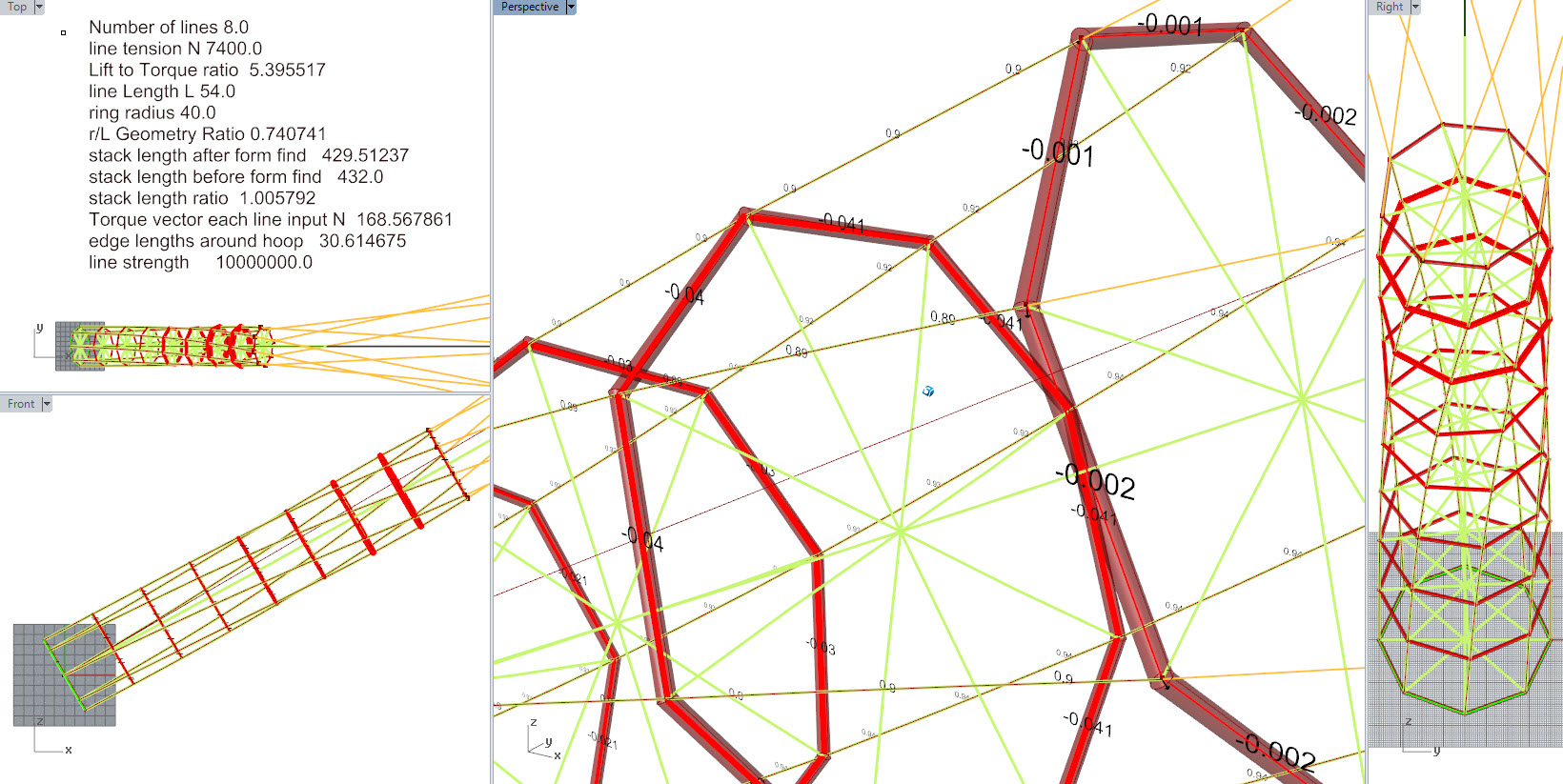
Or soft rotary kite system scaling using >100 kites transmitting torque over a soft line network
Like

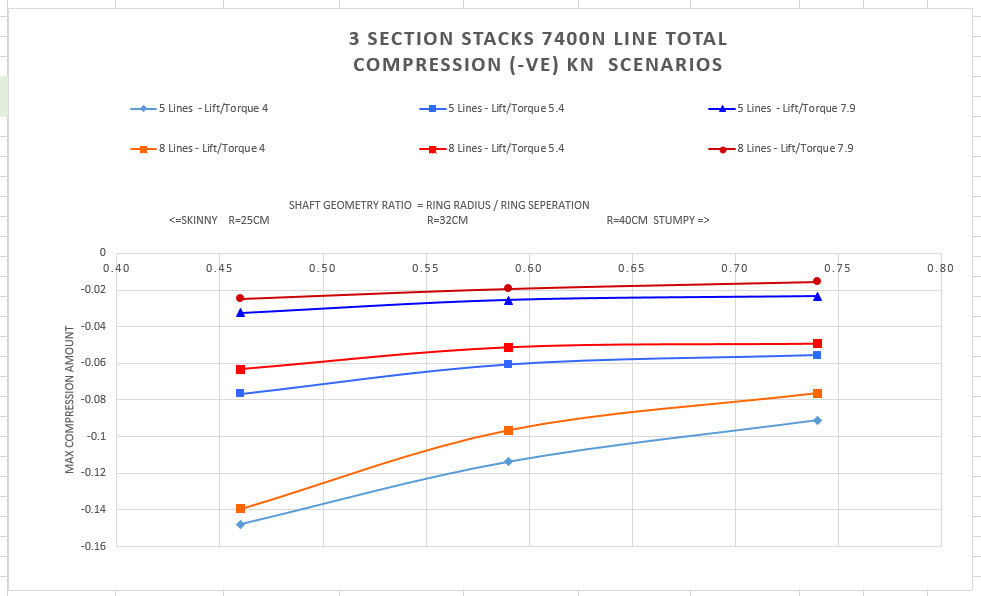
Yes it has limits as partially shown in

but the benefits are huge.
Ask Rachel…
She’s waaay more clevererer than me