It is not what I mean. A rotor could rotate around a rope if it has an even (but not too) short perpendicular tubular axis assuring its perpendicular position in regard to the rope thanks to its tension. However changing its orientation in regard to the rope is not easy if it is really possible. That requires a complete autogyro where the body is fixed to the line, and adds in weight and complexity. In some way the configuration is comparable to Daisy’s or SuperTurbine ™ version with rope as shaft: rotors + lifter (a kite or/and also a Sharp rotor which can be used also as separator). The difference is the use of pull instead of torque transfer.
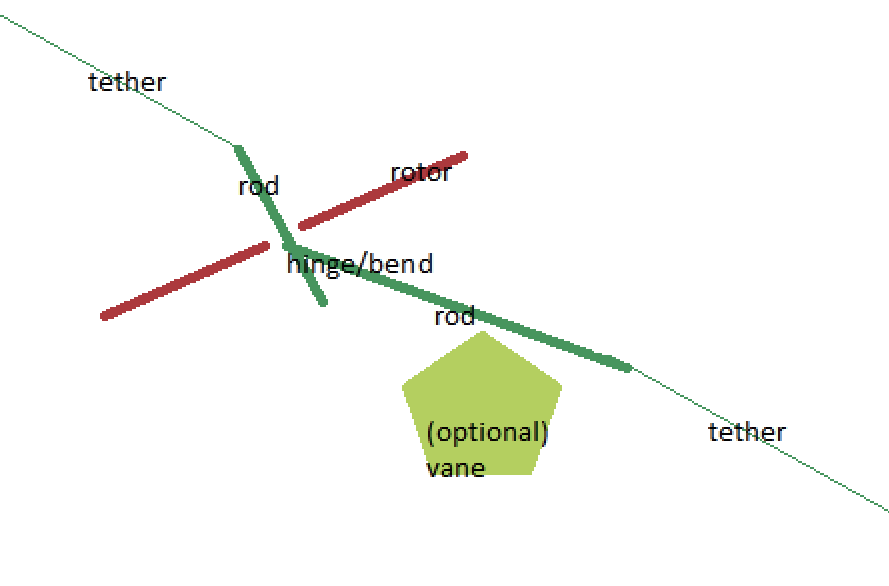
That makes it easier I think. Not having to worry about how to transfer the rotation, you could just put a bend in the rod.
My idea above was to change the curvature of the tether as another way to deal with that problem. Another idea, you could put a loop of string between your hands and play with varying the distance between your hands, the relative lengths of the top and bottom parts of the loop, and where you could put rotors (weights) on that loop to get your rotors pushing in the direction you want. At the bottom of your loop you could vary the length of the bottom and top parts of the loop to make it behave differently. At the top of the loop you’d still need a tether pulling up I think.
If it needs saying, this is just brainstorming. I don’t particularly like my or your idea.
I mentioned the use of pull from a while.
There is only rotors with their respective hollow axes and the rope within, not rod.
I don’t see why we should change the curvature of the tether. Each rotor could have the same angle of attack (AoA). Dealing with different AoA is not needed in this configuration for what I think, even as it can be desirable in another context.
Brainstorming is better than nothing, especially since none of the AWES is close to succeeding on a significant scale. It is a mean to simplify the management, avoiding crosswind complications, and perhaps allowing a better maximization of the space as it scales by the number of small rotors. But some other problems can occur.
Concerning your idea, a detailed explain with a sketch could be useful.
To resume this is like the device below but by replacing a large rotor with numerous small rotors since a rope can be used. One could make the same by replacing rotors with numerous small kites but the implementation of rotors look to be easier as they are settled around the rope.
http://cdn.pes.eu.com/assets/misc_new/peswindissue17talkingpointskylimitpdf-891355291894.pdf
I waited a clear reply from @Ollie to my question about the ratio kite lifter area/rotor area, and he confirmed it on Daisy progress with rigid blades - #75 by Ollie.
So that can be a brake for the system I just described. But I am not still sure of this as the torque is not used as such, only pull.
In my idea, there would be a bearing, perhaps a plain bearing, between the rod/tube + … + (vane) and the rotor.
I think the rod is mandatory. You could try it, what happens when you put a rotor on an inclined rope? I think it would just slide up and down the rope with no way to transfer the pull. You could put stoppers on the rope, but then you’ve already introduced the rod, really. The rotation would also wear down the rope and be a source of friction.
You’ve got the rope and the rotor, you could try this out now.
To make the top rotors pull more upwards.
… so above I’ve put a bend in the rod. You could also make that a hinge, which would give you some control in the direction the rotor would be pulling. You’d need that hinge to always be oriented correctly, otherwise you have a chance of the rotor pulling more or less left or right or down instead of more or less up. What should that hinge do and what are possible inputs to it? Other than actively controlling it from the ground [1], there’s perhaps relative wind speed, tether tension, tether angle, rotor pull, gravity. You could try to use some of those inputs to control the hinge. You’d want to control tether angle I think.
Or instead of or in addition to adding a hinge, you could make some bends in the rod that control in which direction the rotor is pulling based on how strong it is pulling, the rotor would be sliding up and down the bendy rod.
[1] If you’re going to be actively controlling it from the ground, you could make a program that keeps the (graph of the) tether curve within what you want. Every hinge could potentially receive different inputs.
I tried it and that works. I put small stops upstream and downstream of the hollow axis of the rotor. The rotor provides thrust in the direction of the rope as it is perpendicular to the rope. No need for long rods.
I did it (see above). If you want, stoppers, and also the hollow axis of the rotors between them, can be seen as rods, but their whole length is minimal compared to the rope length: 10 cm/1 m with stacked rotors at most, likely less.
Indeed, and the rotation twisted the rope, even with bearings. To avoid rope twist using paired rotors rotating in both directions. Wear and friction could perhaps be mitigated with bearings within the hollow axis. Or the rope should be changed: by using yo-yo mode the wear occurs quickly.
Please can you provide a sketch with the force vectors? I think it is not easy if it is even possible. If it is possible the force along the rope would be modified, so its curvature. For this I see only two ways: the lifter kite as it has a bridle with settings changing and stabilizing its AoA, or putting complete autogyros with their respective bodies (on the line) working as bridles.
I didn’t say anything explicit about their length. I think I’d express that as a fraction of the rotor diameter. I’d say that would probably be less than 1. That would vary with how much you want to offset the rotor angle with the tether angle (and the tether tension and …), more difference needs a longer rod I think.
Let’s also introduce rotor diameter over tether length, d/l, as a measure of the distance between rotors. You would vary that and try to find an optimum.
That would imply I know how it would work. I don’t. I’d sooner play around with a loop of string to see if I could understand how it could possibly work, if it could work. I like my bendy or pivoty rod idea better, right now.
Yes, my rod + (vane) + … + could be thought of as a simple autogyro.
The high and low parts of the rope can also be replaced with wire ropes in order to resist wear by respectively the rotation of the rotors and the winch during reeling phases.
In someway complete gyrokites could perhaps offer more possibilities but they would be difficult to implement on a line without tanglement risk, while rotors turning around a rope is a natural configuration, like the example below, but where the larger part of the pull seems to be generated by the relatively large lifter kite, the rotors providing torque (unlike the gyrotors I experiment for their pull):
That’s assuming you’d tie the gyrokite on a line branching away from the main line I think. That’s one way to do it. I don’t like that as then you’d need to make the gyrokite/rod more complex to make it fly stably. If you make the line go through the rod, the top and bottom of it are relatively fixed in place.
If you’ve got your gyrokite/rod, you’d just have a rod section above and below the hub of the rotor. You would tie your line to those. The only added entanglement risk then comes from the rotor no longer being perpendicular to the line, which you could ameliorate by making the rod sections longer.
Indeed that could work with a long enough rod/gyrokite. I will try to see some other pros and cons to both configurations.
As a rotor is naturally unstable, the gyrokite should be complete, comprising a stabilizer and a rudder, even allowing AoA change by moving the point of attachment of the rod/gyrokite as for a current gyrokite or other kites. Moreover for this configuration a lifter kite is not required.
For the configuration I describe and test, the stability of the rotors is assured by the tension of the line via their respective hollow axes, the rotors losing any freedom. But the lifter kite (or the Sharp rotor) should be large enough to ensure the inclination of the assembly even in turbulent wind conditions, probably according to a proportional ratio of lifter area / rotor area. Perhaps there is a possibility if the size of the lifter area is not too large compared to the size of the rotor area.
After the flight functionalities, the easiness of the management of the elements in operation can be examined, even considering that the chances of success are limited whatever the configuration.
Same in mine I think. Perhaps greater because of the greater length of the rod. The moment arm of the rod about the hub is greater so a lower line tension is needed to keep it stable.
I’m more wondering about how you’d start/stop/tilt/depower/fold the rotor, perhaps using the inputs I mentioned above.
These questions can all be explored with a line loosely tied between two points with a rotor/rod/gyrokite attached to it. That makes it very easy to test things.
Is your rod the axis of the rotor?
Yes, also the axle. With a (possibly plain) bearing between rotor and axle/rod. The rotor would rotate around the rod (and with that around the main tether, not above it).
You can make the “rod” more or less complex, you could make it shorter or longer, you could add bends, a hinge and ways to actuate the hinge, a vane, and so on, according to your need. You wouldn’t call it a rod then anymore though I suppose. It would have some elements of a gyrokite then so I called it a rod/gyrokite.
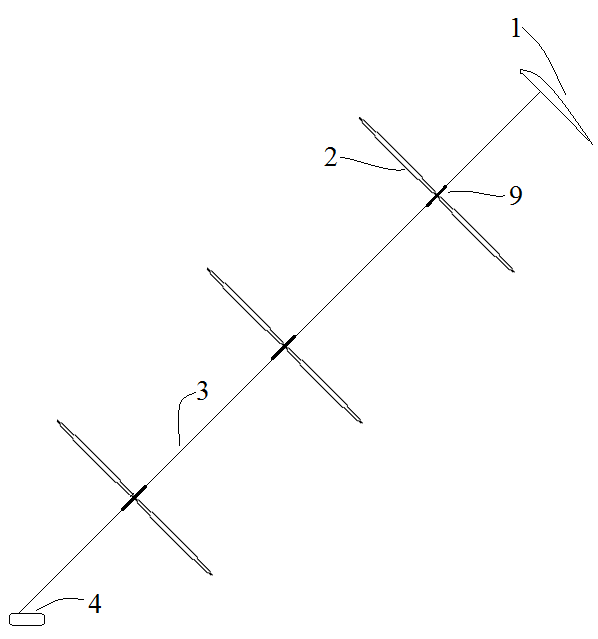
In fact it is not needed although useful in some configurations. I used a hollow axe (9) rotating around the line (3) only because it was what I could make with my material. The hollow axe (9) could be a fixed rod (9) as well, then the rotor (2) rotating around the rod (9). There are stops in all cases to prevent the rotor sliding as it pulls. As rotors around a line don’t fly, whatever hollow axes or a rods are used, a lifter kite (1) is required. If we don’t want implement a lifter kite (1), complete gyrokites should be installed on the line, leading to entanglement risks.
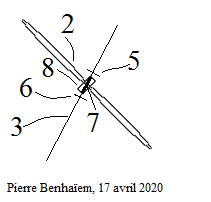
I thought also about a shape allowing the rotor to not be quite perpendicular to the line in order to change its angle of attack (AoA). In the sketch below the AoA increases, leading to a loss of elevation angle because the AoA is already very high. It is perhaps also possible and maybe desirable to decrease its AoA in order to increase the elevation angle in the top of the line, but in fact the result could be limited as the line will want follow the pull.
A photo I put again of the lifter kite (0.2 m²) and a 0.555 m diameter black rotor of gyrokite. The set was tested. Elevation angle: 45° for the kite, 35° for the rotor fully rotating and pulling. The flight photo was not possible due to the manipulations.

Well, one at least, as an alternative to a lifter kite at the very top. I don’t understand the entanglement risks. There wouldn’t be a separate line (for the gyrokite) to entangle with the main line, in my idea at least.
I think that is actually mandatory, probably for every rotor on the line not just at the top. I think if you angle the rotor down with regard to the tether you actually pull the line down. If you keep the rotor perpendicular to the tether you don’t have a passively stable system against the force down (gravity and drag), or you have no buffer against perturbations of the line, just like an airplane without dihedral isn’t passively stable. It will just push in whatever direction the line is pointing. You would want it to push more up than that to overcome its own drag and weight.
I guess an analogue for that is that you also don’t attach a kite perpendicular to the kite line.
The tether will be a curve no matter what you do. You could think about what curve you want that to be and with what rotor angle offsets and rotor spacing you could achieve that.
Yes, by connecting the gyrokite to the rod (9) settled around the line (3) with a hinge (I think you suggested this mean, but I am not quite sure), a little like on the video below:

The other issue is more complex and I am far to have answers on all points. If complete gyrokites are not used, so if rotors turn around the line (directly or via fixed rods) the lifter kite will supply both elevation angle and stability, that according to its area compared to the area of the rotors, as for Daisy.
And the curvature of the line will lead to different AoA for each rotor, perhaps without too serious consequences in regard to their respective pull.
On the experiment I made with 6-8 m/s wind speed the (perpendicular to the line) rotor turned fast, looking stable (partially thanks to the gyroscopic effect), then stopped when the wind was weakening.
I will experiment with three rotors under the same small lifter kite. Perhaps they will fly at a very low elevation angle, below the 35 degrees I obtained with only one rotor.
Yes, interesting. So complete gyrokites could perhaps overcome this issue, their respective rotors being not dependent to the main line. Or a large lifter kite would be required if rotors are dependent and perpendicular to said main line. Or perhaps other solutions like on your sketch with a gap of the segments of the tether allowing significant angle variations, or on my sketch below (I put again) without gap but with limited potential of angle variation.
I don’t really understand what’s happening there. That system looks similar in some way to what you want to do. It has a rotor that is relatively free to pivot, just like in your system. The rotor then pivots up in the wind. Do all rotors do that when free to pivot or is there some other reason it pivots up, like the pivot point being some distance below the rotor or the wind pushing against the tail of the airplane?
Autogyro rotors are free to pivot I think and they also seem to pivot up.
I wrongly thought this device (on the video) was what you wanted, as you mentioned a hinge. But now after seeing your sketch I understand better what is your purpose.
Nor is it similar to what I want, as I describe rotors spinning around a rope while the device on the video, or a gyrokite, or an autogyro, all have a fuselage, a rudder, a stabilizer, and an axis for the rotor, said axis being not the main line.
This is the similarity. Because your tube is very short, the rotor can pivot relatively freely if the line tension isn’t very high. The longer your tube, the less the rotor is able to pivot.