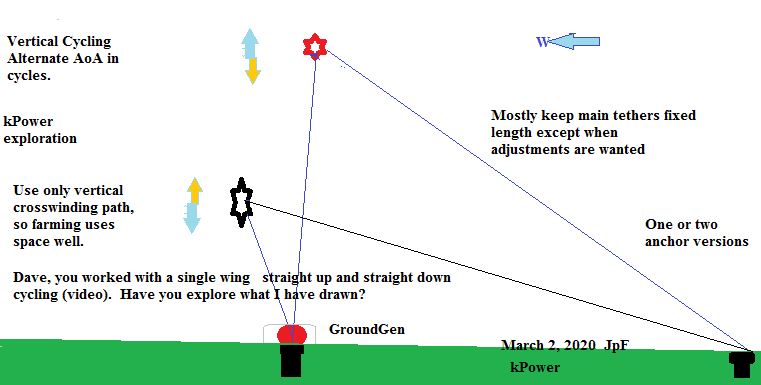
Diablo non-Yo-Yo Vertical Paths with Static-Length Tethers for Mains and Working Lines
Have either central diablo or spread to two rounds. Have either one or two anchors for the two main tethers.
Diagram happens to show one anchor for the two mains; and diagram shows one diablo PTO rather than a spread two round scheme. The main tethers stay static length until wanted otherwise occasionally. The working line between the two working kited wings stays constant until wanted otherwise. Line wear points are reinforced. Wings are controlled to use vertical paths to maximized region space use.
This topic was not included in Pierre’s topic as the present deal is non-yo-yo AWES.
Open for analysis. Open to experimental use by others.
kPower
DaveS short video is distinct from the topic system, but does demo vertical shunting from static-length main tether.
PS: Notice this topic’s system is distinct from the KPS system.
Vertical Shunting (Vshunt) is one more of countless ways to do AWE. As is clear from the KiteLab Ilwaco video, its not too hard, and works fairly well. The weirdest myths in AWE are that nothing works, or just one idea is good, or that ventures who fail by bad kite designs and poor skills suggest that true kite experts cannot prevail.
Wubbo was right, “we can choose what sort of AWE we want to explore”. There is no one best way, just endless challenges and solutions. There are multiple interesting load-motion geometries. Vshunt is one of them.
Seems like a great idea Joe. Looks simple enough (as everything does on paper).
The paths would not be vertical as described and shown, but an upwind arc.
Imagine if the billions spent on AWE would have directed just a little to each decent idea.
I doubt if anyone will ever bother trying this in a serious enough attempt to get any “traction”.
The two-anchor variant is available, one for each main tether. Such would give some “breathing room” for the two main branches of the system.
Two far-field at-ground roundings are available; one still for PTO.
Of course you are correct in fine-saying that the non-vertical in the zenithal sense for the wing pathing; the wing following the fixed path on the sphere of flight sometimes is taken as “vertical” in context of field viewing as an approximation; fine tuning analysis would, of course, respect what you pointed out. Greater crosswinding occurs on the up-going path along the path on the invisible sphere than if true vertical resulted from control of main-tether length, but static length was called out. On the down-going pathing crosswinding would still be anticipated, but less than in the upgoing section of flight.
Edit#01: Thus, I am favoring that the main tethers remain static length; the up-going pathing along the spherical surface provides a more severe crosswinding than if the main tether was being adjusted just to get true vertical path; the true vertical path would have less crosswinding. Keeping the simplicity of not having to change the length of the main tethers for most of the production running may be a significant benefit for some installations. This system is not a yo-yo matter; see Pierre’s topic for yo yo; the system he is unfolding has fewer lines than the present-topic. The present topic herein has two main tethers and then also the production line that connects both involved wings through one or two rounds at the ground.
In some installations one might dispense with main-tether reels or drums or winches altogether; just anchor to Earth very directly or immediately. Using huge wings (or wing sets) might ordinarily invite expense line-handling winches; but some installations might want to save all the costs and todos of winches and reels for the mains.
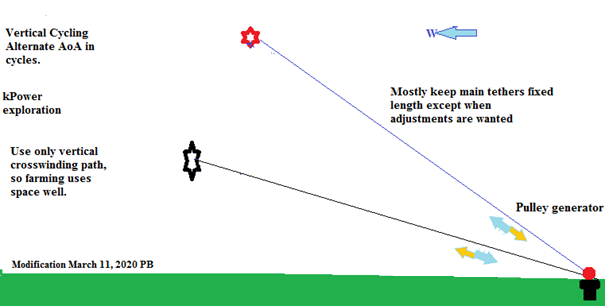
This is an interesting investigation. To avoid dividing the forces and to allow facing all wind directions, I propose a simplified design with only one ground station gathering the anchor, the pulley working the generator.
Showing now in this topic are two distinct systems, the topic starter and the now the interesting mod brought in by Pierre. Both distinct systems may be investigated. Being distinct the two systems will have their specific challenges, pros and cons. Thank you, Pierre, for wrestling with the topic system and coming up with the shown “PB” mod. I am thinking that the PB mod is so distinct that it deserves a topic focus on its own. Please modify the drawing so that “March 2, 2020 JpF kPower” is not on the diagram of your fine offering; thanks.[[Edit: Thanks, PB; I see the change made. Edit: See new topic for the mod-variant:: PB synergistic vertical path pulley-PTO Diablo ]] Then we all may discuss the topic system with focus and also the PB system.
I propose this in order to finally obtain as much value as possible from reaching deep into both systems. The two are with some deep essential differences and probably thus deserve full separate topic discussion flows. You may own the PB system which seems to me to be a close cousin to twin wings in pumping mode. It will be cool to discuss the PB item in its focused topic.
Of course. a third flow would be (following development and experience and clarification) a comparison of the two systems; I suggest that that would come a bit later in time. But it might not be unavoidable to begin a little comparing while I am recommending splitting to two topics; keep the present topic and starting one under the PB March 11, 2020. Maybe choose a name for your item to title the new topic. I will gladly post in the second topic when it is started. Thanks.
The little comparing to urge splitting to two topics:
Diablo non-YoYo Vertical Paths with Static-Length Tethers:
Static-length mains
Distinct working PTO far-field assembly
Four visual strands seen
Two ground-activity areas: PTO and near-field anchor
PB active near-field pulley-PTO Diablo:
Non-static length mains (but perhaps static-length combine mains.
No far-field-ground-activity assembly.
Two visual strands seen.
PTO-Anchor combination in near field: “Pulley generator”
=============== That preliminary macro comparison does not address what later we may address: costs, wind-matching, safety, operational logistics, scaling matters, control challenges, LCOE, and more.
Another variation would be two looping kites and a single groundgen PTO.
An immediate issue is power is harvested going up when gravity works most. For this reason I believe the method is mostly feasible only for soft kites or small scale…
That suggested “variation” system would make for a cool topic starter. Tallak, would you consider starting a topic on your suggestion? It will be neat to discuss the system you will describe in your new topic. Thanks.
vvvvvvvvvvvvvvvvvvvvvvvvvvvvv The note you make on the present topic about gravity matters is important for analyzing the topic system. You note that the up path of each wing is using wind energy to lift the mass of the wing and tether. The up path will be drawing the main tether against air for its full length. And the up path will be lifting the PTO line also. Thanks. Such lifting will be a subtraction from the production potential; and you note that such would be more if the wing was heavy while you suggest that low-mass wings might fair better in the Diablo of topic. The full explication of the topic system will be facing such dynamic surely. Right on! But as noted elsewhere in the literature, the lifted wings bring on a potential energy of position which will play in the down-going pathing. And the cost of reversing directions of moving mass plays in such analysis. Free lunches are hard to come by!
You will not be able to recover the potential energy due to the fact that tethers only support pulling and not pushing.
Anyways the idea is interesting, except the rather large niggle that it is highly dependent on wind direction. Unless this was solved I dont find it meaningful to create more threads on similar structures.
Now that I think of it, the problem would solve itself for any floating platform.
Up/down or looping doesnt make the huge difference. Which is better depends on the particulars of the chosen kites.
A third variation would have two looping kites at some largeish crosswind distance, then a ground PTO mid between the kites. This makes the PTO tether more horizontal and would allow for greater mass on the kites (larger scale).
I think maybe also power may be produced on the more powerful downstroke, recovering mentioned potential energy
Still only half of the loop/cycle would be used. This is common to all these variations
When a variant is with significant difference, then a topic on that variant could be a good place to analyze and develop that variant. Branching to other machines within a focus on a particular machine could get confusing.
E.g. The looping machine mentioned is a distinct machine that is worthy of discussion and unfolding. Looping wings are very distinct from the emphasis on vertical pathing of topic in a specific machine.
Vertical pathing may allow high density farming of the units in a distinct result different from farming looping wings. Comparisons of present topic could form distinct topics dedicated to the task of comparing. Machine#06 compared with Machine#34, e.g.
In the present topic’s machine, the potential energy obtained in the masses lifted in the uppathing wing will be used in the downing wing-tether to help the fall and relative slacking needed so that the other up-pathing wing has low resistance from the slacking section of the PTO line.
The floating means for wind finding is a choice for many AWES. Turrets and railed re-positioning on ground are also available. And we stay open to some installations where fixed directions are fine.
Yes, only one of the two wings is producing at any particular time.
Depending on the scale you are considering, I would say a turret is not practically feasible because of ground space usage. If a 10 MW kite rig has 4 km tether, you need to allocate approx 48 square km area for the turret.
And the PTO should be stationed directly on the ground, otherwise we would be complicating things further
A moving PTO like this is also difficult because the cabling from the PTO to the grid must move.
With the far-field PTO set as two fairleads or pulleys with the line going from one to the other, then consider attaching an eSkateboard weighted to give traction; then the left-right motion caused from harvesting energy from the wind could charge the batteries of the eSkateboard. Scaling up; attach an eCar to the center of the far-field PTO line and charge up the eCar; or same for two eCars or more. Drive up; get attached and go back and forth for some time and be charged up for travel.
Or use the airborne-won energy to place on the PTO line in far-field a polishing disk; and lay some large marble slabs and polish the surface of the marble.
Or give back-and forth rides to people. Or ratchet the motion to drive a village’s surround-village train or industrial power belts.
The subject static main tether on downtime would lie on the ground. In some installations a series of raised Y posts could keep the main tether from touching the ground.
Edit add:
The static-length main tethers need not be of same length. Left wing set’s main could be longer than the right wing set’s main tether.
And the "verticality paths of Left wing set could be offset some from the “vertical” path of the Right wing set’s path.
Edit 2 add __________________________________
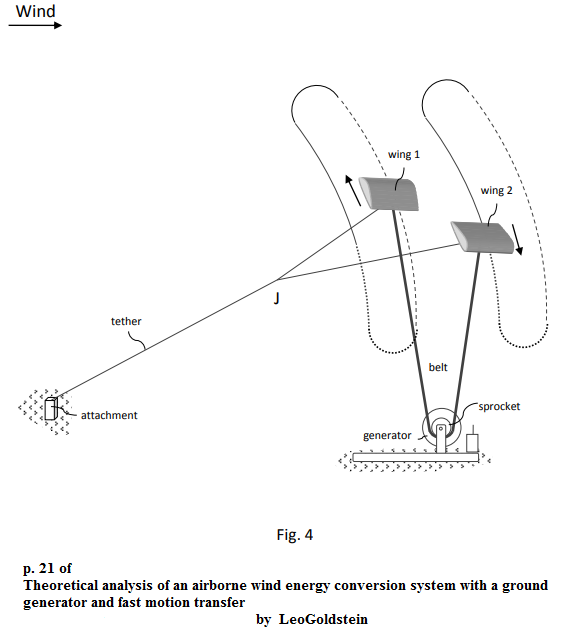
Some of Leo Goldstein’s concepts probably fit this topic.
Theoretical analysis of an airborne wind energy conversion system with a ground generator and fast motion transfer
Especially his Fig. 4 where he chose a single tether bifurcating to hold the two branches to obtain a cousin to topic herein. http://www.awelabs.com/wp-content/uploads/awecs_fast_motion_transfer_accepted_manuscript.pdf
“Theoretical analysis of an airborne wind energy conversion system with a ground generator and fast motion transfer”
{kind=link}