@JoeFaust I agree with your comment. However, I would qualify your expert opinion about “a close cousin to twin wings in pumping mode” as this does not work in pumping mode (yo-yo) but rather in pulley mode by tether transfer from a kite towards another kite. It would be a distant cousin of US 3987987 figure 5 but with only one anchor-pulley and two kites instead of two anchors-pulleys and one kite.
I mentioned this design during the discussion. For what I understand KPS used two winches while the present design implements a pulley to transfer the tether between both kites. Moreover in the current design the down path is realized by the trailing edge.
That said I think the use of such a pulley or some arrangement comprising a pulley could also be possible with spiral/return trajectories. An advantage could be removing the excess of tether, the winches and their motors to recovery it at each phase. There would be only one generator connected to the pulley and delivering energy in full time, from one then the other kite alternately. Rigid kites could be used unlike for the vertical path.
Some sources below can allow to analyse in a deeper way:
From the “Technology” page above: The tension causes a 100-200m line to be spooled out from a drum on the ground, which is connected to a generator – thus creating electricity.
From WO2016083822: Figures 5A and 5B show a multiple winch system boo. Systems comprising multiple winches are advantageous because they allow for at least one airborne device to be deployed in an electricity generating mode while another airborne device is being wound in. As such, electricity can be generated constantly.
The winching system boo shown in Figure 5 comprises two winches 5o5 of a type substantially similar to the winch 1 described above.
Among possible cons, as one of the two kites is fully (no loss) or partially (loss similar to any yo-yo system) depowered, a lack of tension on the side of the pulley toward the depowered kite can occur. If an arrangement simple enough can be implemented (such like making several turns around the pulley to assure a correct enough pull transfer while the tether of the depowered kite is easily recovered to go to the other side) this system could be workable for this issue. If no, the KPS (now KiteMill) double winch is a possibility. In all cases the (more or less) vertical path can allow a better density.
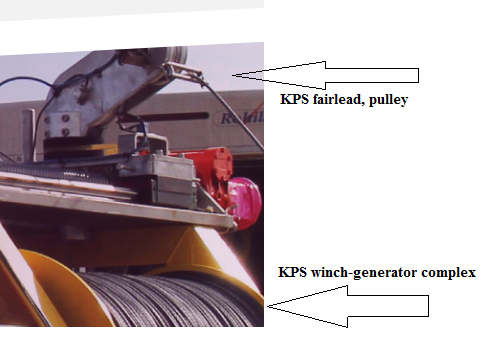
Thanks, Pierre; I know pulleys and winches are different So, not a pulley fair leading into the winch?
The “rail” mentioned probably rolls on its central axis.
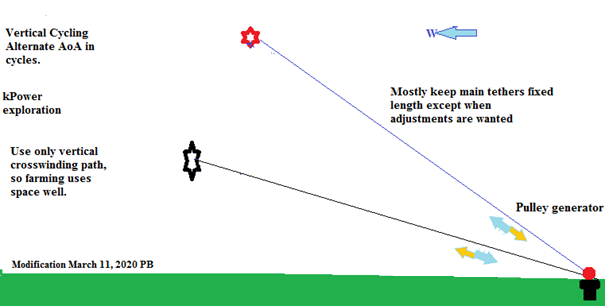
So the main tether goes through the anchored pulley-generator. That main tether has a wing set at each end. Aim is to have the flight paths of the two wings stay close to a downwind vertical plane which plane is perpendicular to the smooth-normalized earth surface ordinarily; such, in part, has a motivation to well use the land space and airspace and permit possible units aside of the first unit system. Flight control of the two wing sets is aimed to drive the pulley-generator and thereby generate electricity. Tautness of the full tether that joins both wing sets must be so that a net one-direction movement occurs in order to drive the pulley-generator. For a one-direction in a time period to occur, one of the wing sets must pull more than the other wing set. So, needed will be control of the two wing sets so that cyclic imbalance of occurs; when enough line has driven the pulley-generator, then a reversing of direction is the aim wherein the imbalance of the wing sets’ pulls are enough to drive the pulley generator again, but in the opposing direction (mechanics to be workout out).
Suppose full slack is nearly obtained by wing-set# and the wing-set#2 pulls very strongly and drives the pulley-generator and pulls through some of the joining tether. The pulling through of the tether will be edging away the near-slack of the other approximately depowered wingset#1. Following some generation the roles of the two wing sets will be controlled to reverse. And let the cycle continue. Generation will be nearly constant; some lag will occur during cycle direction changing.
That said I think the yo-yo 2D vertical path method can be more promising as the kite remains in the most powerful zone within the flight window, and also because its implementation and management are simpler at any scales.