Great intro article
Would not mention brainwhere without a serious warning. It being listed here is legitimizing it somewhat.
@rschmehl What’s your position on Brainwhere and its place in the awes community as a legitimate business?
Hi @Tom, I understand. At the time I was creating this classification chart I was in contact with the founder, Michael Perlberger, who pitched this interesting concept on several occasions. I also knew that research was performed at HSR Hochschule für Technik Rapperswil and that several academics were involved in this. I am not able to run a check on the commercial status of each company. But I did point out then that I have some doubts about the physics and implementability of this concept. I did not get a response to my questions. It would certainly be good if someone from the AWE community would peer review the proposed concept. It basically is a flying vertical axis wind turbine with its axis tilted to the horizontal. Interesting would be to estimate the achievable L/D of the device for a realistic rpm and the mass of the system including the onboard generator and conducting tether. Can this unit really fly? Maybe it will but maybe not.
Hi @rschmehl,
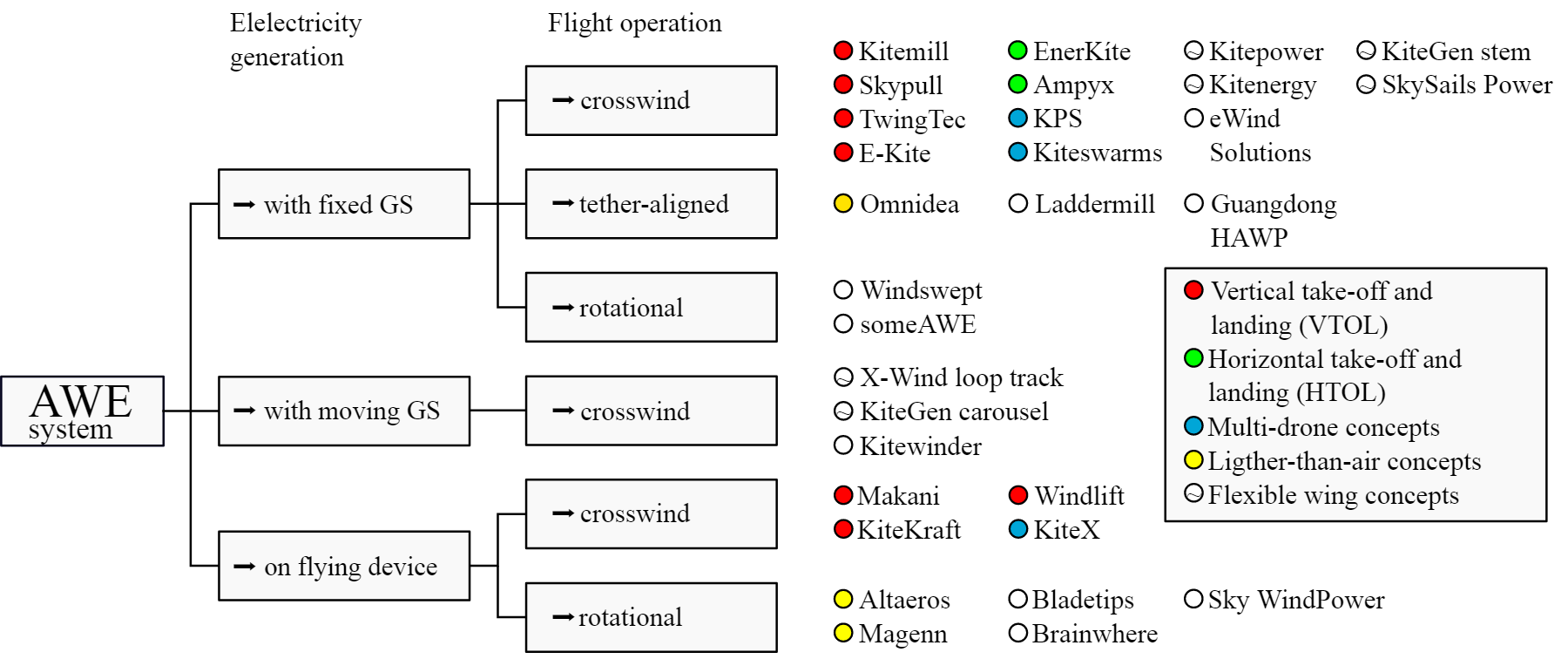
Great article. From the classification, I rather would see @Kitewinder (https://kitewinder.fr/) in “with fixed GS” or/and “on flying device” (the propeller is aloft) then “rotational” categories, if possible by adding torque transfer from the propeller to the ground generator by rope-drive.
Hi @PierreB,
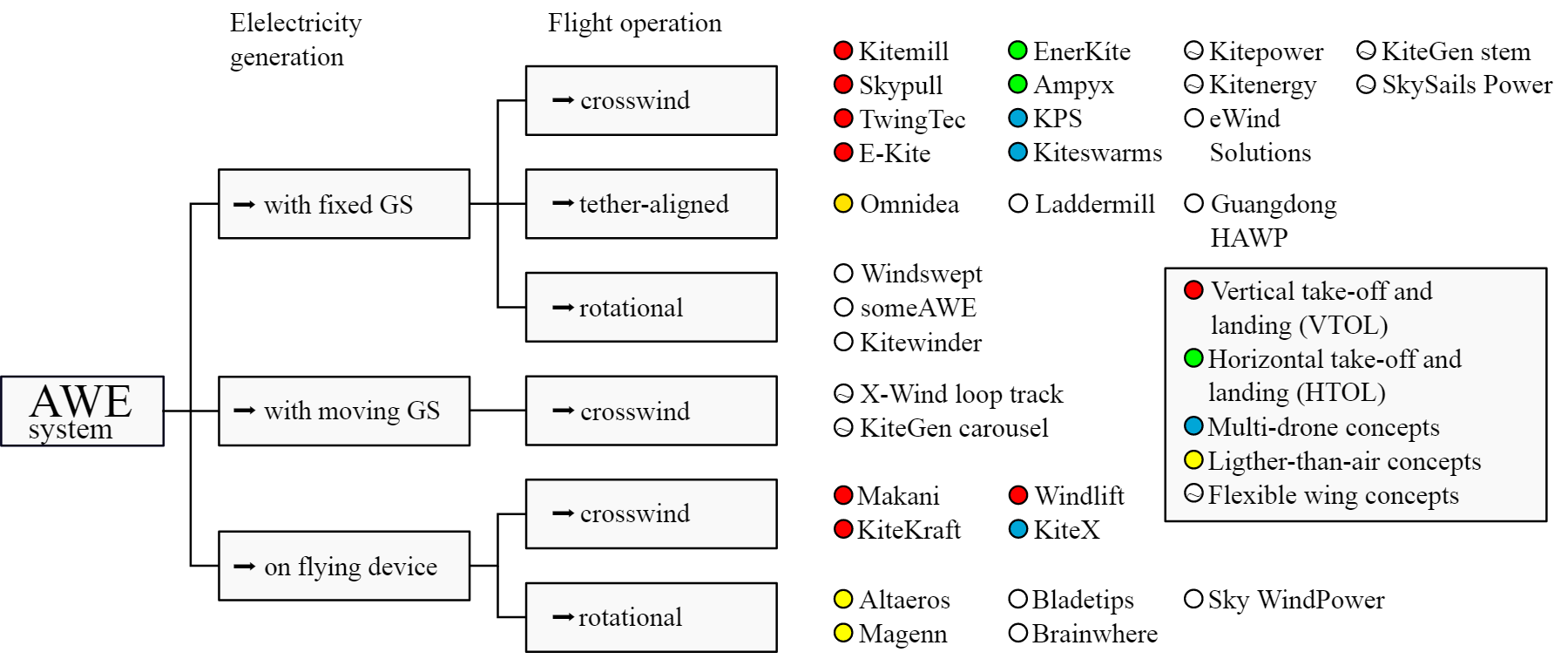
Thanks for the feedback. This is a clear mistake - I don’t know how @Kitewinder got there;-) This concept should definitely be in the same category with Windswept and someAWE.
Hi @PierreB,
I have repaired this on http://awesco.eu/awe-explained/ Please check
Nothing seems to have changed in the classification. The current file looks to be the same.
Maybe an old cache? It has definitely changed for me.
Thank you for your reply!
Having a quirky concept, which might not work isn’t bad. Such a thing has novelty value and is usually fun. Here at the forum we discuss a lot of those.
I take issue with the way it is presented. It’s vastly overpomising for the level of confidence one should have at this stage. This could lead to the whole field moving more in the “professor crackpot” direction in the public eye. And he’s looking for serious investment.
press F5 to refresh the browser. the new classification shows for me.
Here are the slides of my presentation, to complement the video recording: https://www.researchgate.net/publication/339103028_Airborne_Wind_Energy_-_RD_status_outstanding_challenges
Note that I added about 20 additional slides compared to the recorded lecture, also added references and (some) image credits where it was not clear from the context who provided these.
This fundamental AWES ecosystem overview diagram can be improved again.
The 2nd level classification conflicts with how you present your talk @rschmehl
It might be that energy transfer method is a better 2nd level classifier for the AWES ecosystem.
The flight operation of yo-yo class devices is downwind reciprocal pumping as compared to the classic drag loop; Or any kite loop on a fixed length tether. A tight looping kite flies closer to actual crosswind than one which loops further from the power zone.
The Windswept and Interesting Daisy Kite Turbine is described in the talk as the most like a standard wind turbine, and standard wind turbines are described as crosswind devices. Kite Turbine flight loop operation is exactly analogous to the drag mode looping class flight operation, described as crosswind.
An aligned mechanical transfer (yo-yo) certainly implies less line drag from the energy transfer than a crosswind mechanical one.
Is there a reasoning I’m not seeing here?
Michael Perlberger and HSR Hochschule für Technik Rapperswil are exploring a concept space known as Tumbling Wings. They are not the most notorious sort of player making claims that never materialize, after millions spent.
Notable Tumble Wing prior art includes many classic toy kites, like the Prism Flip, which KiteLab Ilwaco used as-is to drive a COTS pull-cord charger. Lets also recall Peter Sharp’s amazing demo version. kPower has also shared many flying variants. Tumble wings are quite energetic performers at small scale, but challenged at larger scales by design dependence on rigid wings and rings.
The kite classification scheme omits all airborne-networked AWES architectures as such. The old LadderMill is included, but not for its many-unit connected topology. Nor does the classification chart distinguish Reeling architectures, with inherent wind-axial motion downwind, from purer crosswind architectures based on USP3987987fig5.
kPower and many other odd omissions persist in TUDelft’s venture map and classification scheme. Open AWE developers especially need not be the touted AWE “stealth ventures” to be hidden from notice to the intended audience. Kite Networks players are especially invisible, given the dominant role such AWES topologies may play.
@kitefreak, Building the map was challenging given the variety of parameter choices an AWES designer faces.
@rschmehl has done an amazing job to structure commonalities in a quickly read form.
The work can be extended with further tabulation and gradation.
The map does highlight disparity in the range of well-explored architectures.
A map of untested models would be very hard to read given the orders of complexity.
Someawe.org developed a map of AWES with more design factor options which was hard to navigate, partly due to it’s size.
I must admit to being surprised the range of potential AWES was not further explored by AWESCO given their initial remit.
Further categories e.g. number of wings, modularity, number of anchors, could all be included…
Maybe a card game of AWES Top Trumps with different scores for different rigs, which would win against each other in different categories is needed.
Hi @Rodread,
Thanks for the feedback. When creating this classification scheme I was also thinking about using the energy transfer method as a criterion, as opposed to the energy harvesting mode (flight operation), as I use it now.
However, almost all operating groundgen demonstrators transfer the pulling force and only very few use torque transfer, to my knowledge (yours and the one of @PierreB). That would have left to a largely distorted classification scheme. Yet my aim was to have a simple, two stage scheme as a compromise of accuracy and readability, as well as reasonably balanced. A third classification stage would have refined this scheme, however, at the cost of readability.
Anyway, from the website http://www.awesco.eu you can download the SVG of the classification scheme and modify this and repost it here.
Consistent with traditional aeronautical and aerospace engineering, power-to-mass of AWES architectures, from lowest to highest, is an essential classification dimension, bearing on inherent performance, safety, LCOE, and scalability.
Another critical AWES engineering classification is design complexity. Makani’s composite aerobatic autonomous e-VTOL M600 represents the High Complexity AWES design space. The Low Complexity AWES “rag and string” design space centers on COTS TRL9 power kite derivatives with supervisory automation on top of passive and/or manual control.
Side-by-side fly-off testing, along with a detailed scoring matrix, are the traditional aerospace vetting toolkit. Results of broad comprehensive testing can early inform the developer and investor community what “Introduction to AWES” will apply. Otherwise a market will eventually decide.
There is a simple and efficient sketch for a way of classification in the document linked by Rod :
VFinal-kW九iMW fin.pdf (500.6 KB, rough translation of some passages from Japanese language) :
(1) woW-Ground-Gen: Without Windmill Ground Generator
(2) W-Fly-Gen: With Windmill Fly Generator
(3) W-Ground-Gen: With Windmill Ground Generator
In fact this would lead to two major categories for AWES:
- Without windmill (yo-yo, Payne’s patent US3987987 figure 5, and some others)
- With windmill (flygen, rope-drive + rotor, and some rotating devices)
In a practical point of view the “with windmill” category would be closer to current wind turbines. But is this a valuable criterion?