The ratio of Magnus power consumption to the generated power is a significant concern.
The paper I already mentioned and I put again gives some data allowing to begin to know it.
https://www.sciencedirect.com/science/article/pii/S0167610518307396
Some data come from the paper.
Magnus power consumption:
Cylinder 3.73m x 1 m, projected area = 3.73 m², area = 3.73 x π = 11.7 m².
530 rpm (figure 13) lead to 27.7 m/s = tangential speed
Air density = 1.2
The equation 3, which is on the last page 29, 3.4. leads to a numerical example from data on the paper:
0.007 x 1.2 x 27.7 x 27.7 x 27.7/2 x 11.7 = 1044 W (the curve on the figure 13 is on about 1000 W, matching the value given by said equation 3).
(Another formula (for AWE, chapter 12, page 293, AWEbook2018) would give a far lower ratio by wind speed cubed x spin ratio X not cubed.)
The potential power for said cylinder would be, in not crosswind yoyo mode (like Onmidea’s balloon):
Power in reel-out phase:
Wind speed = 13.85 m/s (the same wind speed as previously)
Speed reel-out: wind speed/3 = 4.61 m/s
Spin ratio k = 2 leading to Cl = 4 (by the figure 4). Spin ratio k x wind speed = tangential speed (here 27.7 m/s)
½ 4.61 x 1.2 x 4 x 13.85² x 3.73 = 7916 W, and 5141 W after loss by cosine cubed at an angle of elevation of 30°, or 2798 W after loss by cosine cubed at an angle of elevation of 45°.
So the data (figure 4 about lift coefficient, figure 13 about power consumption, equation 3) on this paper could confirm at least partially the values given by Omnidea’s experiments on https://collegerama.tudelft.nl/Mediasite/Play/e51a679525fe491990de3a55a912f79d1d,
the power consumption/ generated power being about 1/4 during generation phase, and being about measured 500 W (and also about calculated 250 W) for a balloon of 40 m² projected area, and for a tangential speed of about 6.55 m/s (from 50 rpm on the presentation), while the figure 13 indicates about 125 W for 13.85 m/s (from 265 rpm), the cylinder being 3.73 m² projected area.
The lift of said cylinder would be ½ x 1.2 x 4 x 13.85² x 3.73 = 1717 N.
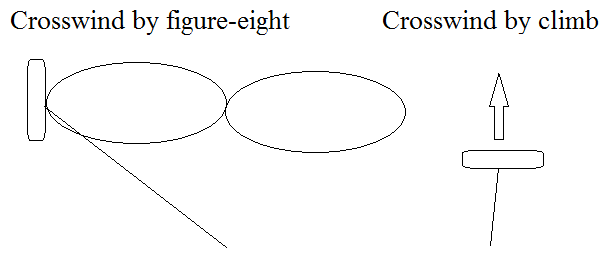
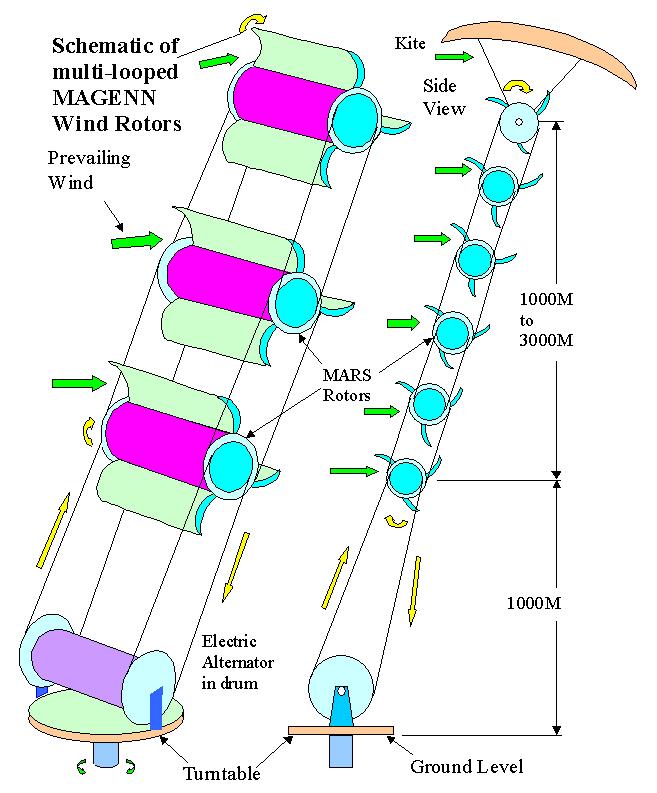
I wrote some parts of this message before but now it becomes clearer for me. More I look after Magnus wings, more I see them as one of promising solutions for AWES, in spite of the high power consumption value at a high (but not always essential) spin ratio value. The main advantage is the potential of maximizing space, but not necessarily using known methods such as yoyo (Omnidea) or flygen (Magenn), or even figure-eight crosswind yoyo as described on the paper on Magenn.