@PierreB’s Rotating Reel (sorry for the small POC)
In my opinion these systems can be suitable as onshore and offshore wind turbines in similar power and height scale as current wind turbines. Probably torque transfer systems don’t allow to reach so high height as tensile transfer systems, but they can assure a continuous power, using a large rotor in regard to the global dimensions, that without heavy components in flight, and that avoiding the HAWT lever effect, that’s why saving material.
The benefit of high-altitude winds is less in (far) offshore, so torque transfer systems can be interesting.
Generally rope systems are used as tensile transfer systems which can reach high altitude but by delivering a discontinuous power in yoyo methods.
Unusually Rotating Reel is both a torque transfer system and a rope-drive as there are not rigid elements between the flying and the horizontal ground rotors. In the other hand the ground rotor diameter must be about the same as the flying rotor diameter and the two rotors should be close each other enough to allow an optimal transmission, or the lifting kite should be larger. On the sea a large ground station can be advantageous for the stability.
The discontinuous power from yoyo methods is a different subject I think.
I understand a rope drive to be similar to a belt drive and chain drive, but using a rope instead of a chain or belt. Using that together with Rod’s or Christof’s rotor makes sense I think, just like it makes sense for Kitewinder. That’s why I ask why not use that?
“Electric cables would be too heavy. With kites, power-to-mass-plus-aerodrag is critical, and the mechanical case wins by a large factor. Wire rope is not quite so amazing as our new materials, but good enough for a critical advantage over electrical. The main challenge is to learn how to drive ropes at speeds of hundreds-of-miles-an-hour.”"
Later I mentioned “rope systems” (for linear rope) instead of “rope-drive systems” which was an inadequate expression as I did not speak about a circular rope in the quote above.
@Windy_Skies I could have confused the words “rope” and “rope-drive”. Indeed, these words do not designate the same thing.
Indeed the “rope-drive” allows the torque transfer on long-distance more than any other torque transfer system compared to the ground rig size. And also the traction of the kite is used to stretch the rope-drive. However as there are mechanical parts in the sky the potential of scalability can be limited.
If you choose one specific system to analyze you’ll end up with a better and more focused analysis. You can then say specific things about the system you analyzed, like how you think it will scale. The way you phrased this you can only talk in generalities - yes, a gearbox gets heavier the bigger it gets. Or is it an invitation to think up systems that have unlimited potential for scaling?
This topic initially was about torque transfer systems. So the aim is not a detailed analysis, but rather an overview of the major features. In my first message I wrote: “Probably torque transfer systems don’t allow to reach so high height as tensile transfer systems…” (“tensile transfer systems” are pulling (yoyo) kites), without taking account of the rope-drive system you mentioned, and which allows to reach a high altitude compared to the rig size. As this system scales, the rigid parts such as the propeller and the pulley undergo an almost cubed weight increasing that makes a limit.
To my knowledge the only torque transfer system that can do without rigid parts aloft is the Rotating Reel System . In the other hand the diameter of the ground rotor must be roughly the same as the diameter of the flying rotor, and its aim is rather from medium to high scales.
As there are topics about realizations using different torque transfer systems and relating pros and cons, I think it is not needed to open new topics.
What was said there could be wrong @PierreB . The argument needs stronger reasoning.
The OTS shaft by @someAWE_cb demonstrates very long length to ground station torque wheel size working.
Also rotary types don’t require a long transmission shaft. The shaft only has to be as long as the length to the first ring of a stacked ring set.
Also the density of material needed for pure transmission drops with numbers of kite per ring (for equivalent kite power) on ring to ring systems.
No @Rodread, what I wrote is based on old observations concerning scaling of rigid parts. https://en.wikipedia.org/wiki/Square–cube_law can apply to almost things that are shaped in three dimensions. A model car of 0.5 m can weigh 1 kg, while a car of 5 m would weigh about 1 ton.
It would be the same for rope-drive mechanism aloft because when
I did not mention the OTS or Daisy shafts in my message (but I could it), precising that
It is a simple description of the features of Rotating Reel System. If you think there are other torque transfer systems that can do without rigid parts aloft, please inform me.
A shaft with rigid parts such as rings or others makes the rigid parts undergoing a higher transfer torque as the number of kites increases, and also higher different forces resulting to wind changes implying torque transfer changes leading to buckling. Let us add that their manipulation is not easy. I would know the strategy to assure takeoff and landing. How the shaft can be folded then expanded during operations?
Again, @PierreB I think there has been a jump to conclusion here, without observation of the real nature.
In terms of scaling torque systems over soft lines…
Can the kitegen carousel be considered a large scale torque system design,… driving kites continuously around a large ground ring
and
Kite turbines are able to maintain and expand their stacked ring form without using any rigid material.
I have pointed this out here on
and in physical tests where you see the kite rings expanding… e.g. look again at these rigid blades whinging around with almost soft structure between them… Both kite rings are adding torque to the set and expanding the whole cone shape as modelled… (although offset a 1/6 turn in this config)
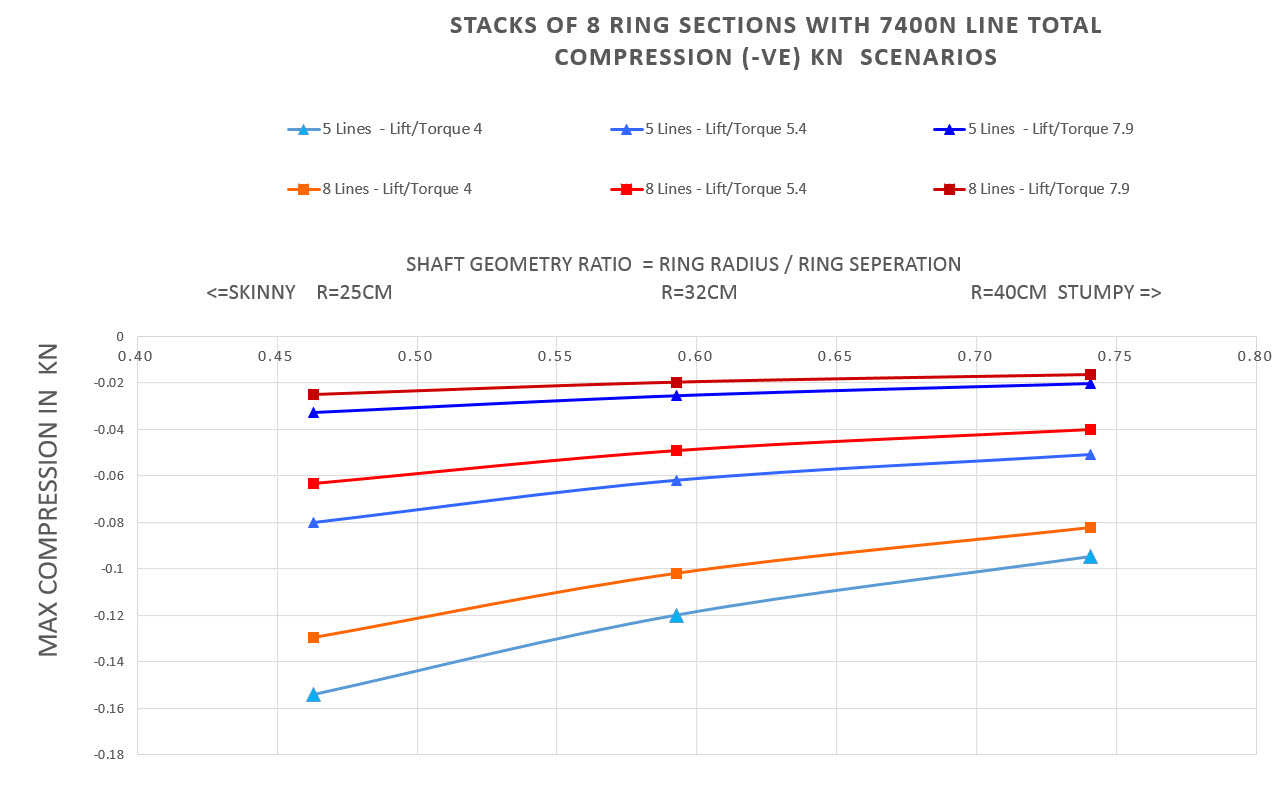
also, compression on TRPT components is REDUCED, for similar transmission conditions when the line count is increased. This is a section which does not have to scale length. I’d happily accept any EVIDENCE to the contrary.
I am only able to see that Daisy height is about ten meters for years.
The pull of the kites is used, not directly the torque of the kites. And also the ground station of pulling yoyo kites use torque in order to rotate the generator. Have you a serious example of torque transfer system without rigid parts aloft apart rotating reel system?
True, but you use rigid parts aloft for the shaft.
That seems a harsh interpretation @PierreB .
Daisy grew and changed configuration many times.
Heaven forbid that the past performance of a design made by one man in his home loft be the determining limit of the future of a clean energy production method.
Ridiculous.
In that view a rotating real system can never be more than a kids hoolahoop with an umbrella, winglets and dog leads.
OK just to make this conversation even more farcical, I’ll take a stand…The Carousel circular rail PTO method by Kitegen can definitely be analysed correctly as one huge torque system with a vertical axis… Rotating reel and Beaujean systems are not torque systems because the PTO is out of plane with the kite motion.
Rotating reel and Beaujean systems are not the same. Both are torque systems but Beaujean’s AWES is a flygen with rigid parts aloft, and rotating reel system is a groundgen with no part aloft. And to be “out of plane with the kite motion” is another concern.
@Rodread what you definite as a torque system (carousel) could apply for all wind energy systems, comprising yoyo system as the winch transmits the torque to the generator from the pull (not the torque) of the kite. The carousel is not purely a torque system, as the pull (not the torque) of the kites is used to rotate the ground ring as I explained in my previous message.
A torque AWE system uses the torque of a rotary kite in a mechanical way by transfer, or by using electric transmission. Some examples are Sky Windpower system (electric transmission from the torque produced by the autogiro-like), some versions of SuperTurbine ™ of which yours, rotating reel system, kiwee with its rope-drive (torque mechanical transfer devices), perhaps also flygens like Makani’s wings. Ground-based wind turbines are torque systems (electrical transmission from the torque).
I hope that will help you to basically understand.
I would add that the significant increasing (by cubed law) of weight of the Daisy’s shaft as the whole is scaling would lead to a lesser elevation angle of the shaft compared to the elevation angle of the rotors. A consequence could be that the first rotor would be at ground level.
I won’t share some of my more basic thoughts here for the sake of civility.
The TRPT shaft length of a kite turbine doesn’t scale with kite turbine size. The ratio of gap between rings to ring diameter is constant. The wing length can stay constant for any size of kite turbine. You can scale by number of kites on a ring. This means at a certain diameter the TRPT can just disappear… e.g. not be there… The blades are way above the ground in a single hoop to hoop hop.
How can a thing, which isn’t there, have any weight? You’re going to have real trouble trying to explain that to me @PierreB
This is called involuntary humor. Indeed @Rodread “farcical”, “ridiculous” are your usual marks of civility in a technical debate. And also to paraphrase, I would say:
I won’t share your basic thoughts as formulated by the flood of insults you pour on me by private message here for the sake of civility.
But the rigid parts yes.
The shaft with rigid rings is on all the photos and the videos. But perhaps they are made in an empty material. The rotors with their respective kites are another affair.
A main point: the rigid rings undergo not only the torque but other forces that are provoked by wind changes.
End the discussion? Is that a new button?
We haven’t even decided what scale is medium yet…!
Certainly not seen a medium-sized actual flying torque transfer system ever if that helps define it.
Go on share the flood of insults.
(They’re pretty funny, but too short and few to be a flood of weegie (Glaswegian) words)
You might have learned them had you been interested in attending AWEC2019
I really don’t see how a change of wind, is your supposed downfall / weakness of a network system…
Networks handle this better than any other AWES as far as I can tell. Have you anything which suggests otherwise? how would a (maybe not even there ) rigid interconnect hinder this?
It seems clear we have a disagreement here @PierreB …
Perfect opportunity for some qualified research to clear the air.
certainly not time to
fin
Unless it’s fin, like a wing or a dynamic blade, Or Fin like my boys name. He’s tech nerdy, taller than me and dynamic too.
Look I really appreciate the critique but come on. Qualify it.