One could make the fuselages longer to increase the moment arm of the fuselage and with that have the tension in the TRPT ring have more of an effect in keeping the fuselage straight. Maybe with longer fuselages there is less of a need to keep the rest of the TRPT ring rigid.
I don’t know if this the most recent version of your system, but things that are somewhat surprising to me is that you’ve staggered the rotors, and with that doubled the number of lines and with that line drag. And the tethers going to the center of the TRPT ring seem to be under some tension, as they help keep the torque ring circular, seemingly reducing the torque carrying capability of the system.
The suggested changes might make the system floppier while the turbine isn’t spinning, so you could use the ground station to start the rotation, expanding it, perhaps.
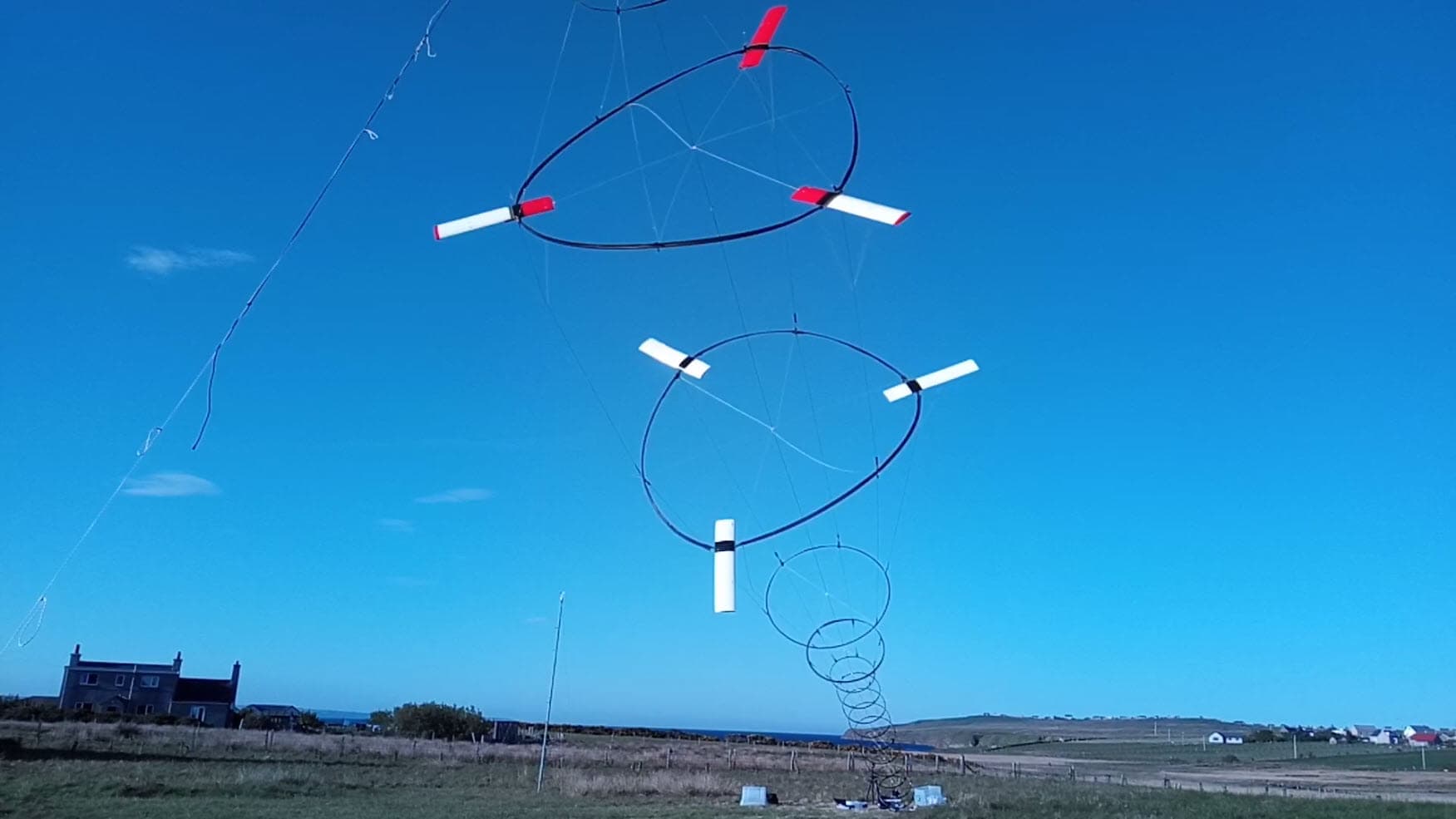
The fuselages hold the blades and the rotor TRPT (Tensile Rotary Power Transmission) ring together.
Just to be clear, they are the black bands seen on the lower white rotor blades
1st paragraph - longer? - not sure I’m following you here, which dimension longer? spanwise radial out from centre, chordwise band path, or depth in line with the tether line
The TRPT rings for the rotor need to maintain enough rigidity to be able to launch and land.
Longer structures bend more easily.
2nd para - no that was not the most recent. we moved away from rings to using polygons. Interfacing with the fuselage had trickier shapes but overall we broke fewer TRPT tubes.
Doubled the (Number) of lines = wrong.
Why?, 2 rotors on 1 TRPT is more like halved the number of lines. = less drag per rotor.
The tethers to the centre are tensile yes. Most AWES suffer from not being able to maintain a small radius looping flight. These tethers prevent the rotor from exploding centripetally. They allow the rotor to spin a lot faster = more power with less torque = less material. Tensile design is an amazing thing use it where you can.
3rd para - which suggestions? and pre spinning the rotor is a great idea if you can maintain directional control of the rotor and your induced spin is results in upward thrust, however this needs the rotor to be spinning in a more horizontal orientation. For simplicity of launch we instead used a lift kite at the rotor head and stretched the rotor and TRPT out on the field (Please tell me you knew this already)
4th para from the picture I uploaded 10th International Airborne Wind Energy Conference (AWEC 2024) in Madrid - #67 by Rodread - I spoke with Franz about his concept at AWEC
As you pointed out earlier there’s a balance - you don’t want too many bridles going around at full diameter. We know that a rotor with effectively single line blades (Multiple bridles) works fine, and holds the blades well with respect to the plane of the rotor.
I do agree though
This softer ring rotor required more bridling
And I also agree that a combination of lines up the centre of the shaft and up the outside of the shaft can likely make a larger TRPT more feasible see
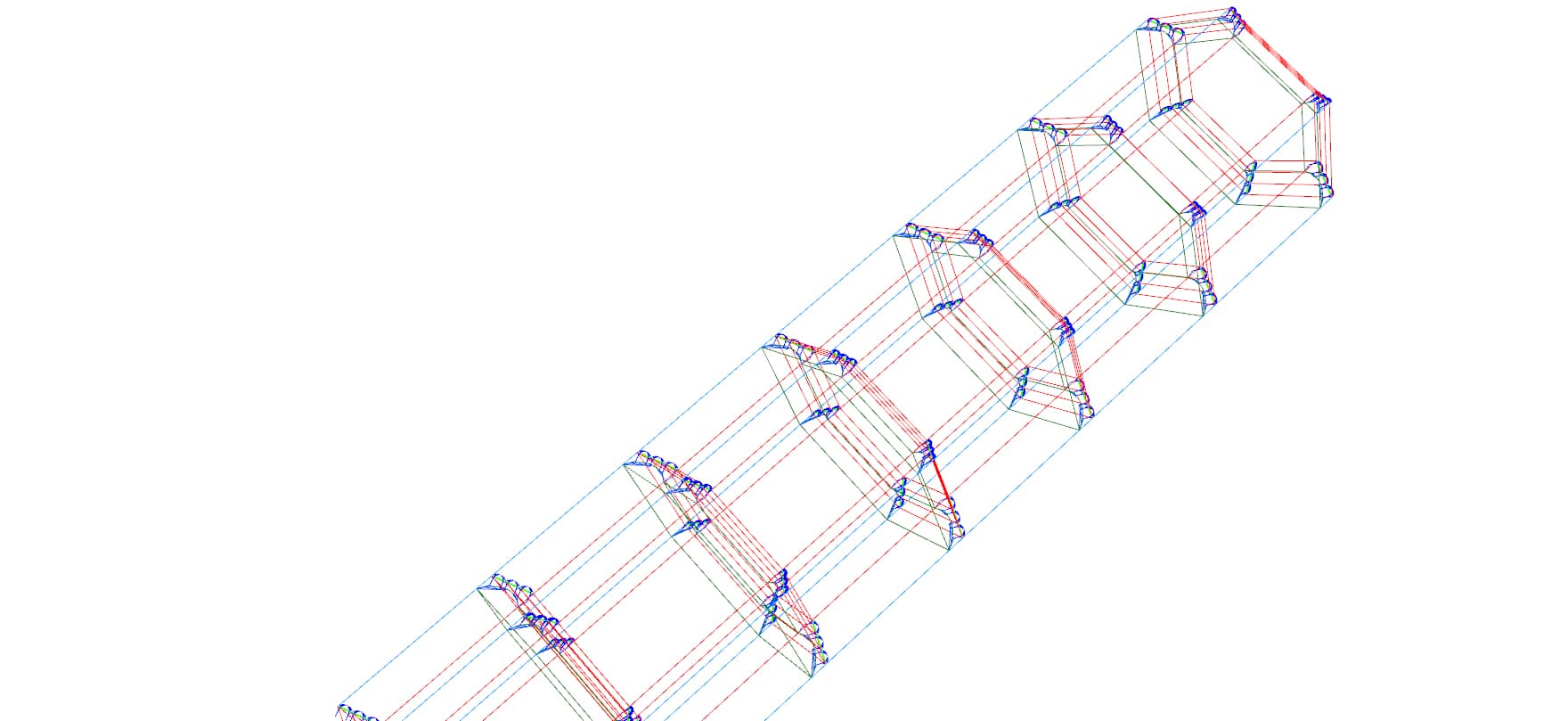
In this concept (The OM stack) the blue outer tethers and red inner tethers support kite blades made using multiple smaller kites (shown as Blue soft kites) on an arch configuration.
It was assumed this would have to be launched vertically from a ~ fairground tilting centrifuge carousel style groundstation
Let’s explore the topic a bit differently now. You want to use (semi-rigid) wings to be able to put clamps inside the wings, and to reduce needed bridling. I also say you want to use multiple bridles to reduce the needed strength of the cantilever beam that the wing is to resist the lift forces.
To make an efficient system that generates some power, and is also able to transfer torque to the ground, you want a wing with a high Reynolds number, so flying fast, with a reasonable chord length, and a high aspect ratio. That all points to a single ring of kites on the outside of the shaft. You also can’t make the wing too long however. Let’s go for 3 meters like you described in your recent end rapport.
Previously, the highwind group probably, said a good looping diameter was 9-10 times wingspan. If I independently think about this, I want to say that the unachievable ideal is (Velocity _{ \ inner\ wingtip})^2 : (Velocity _{ \ outer\ wingtip})^2 = 1 This is anyway I think a metric that takes into account the lower flying speed of a soft wing and allows that perhaps to fly in a smaller diameter.
Off-topic for this discussion maybe, but a different metric that I think is useful for a controlled shaft is minimum orbit time. You want to probably increase that as much is reasonable while you are trying to learn how to control the shaft, so you have more time to control the kites, so you’d increase the diameter of the shaft as much as possible. It also conveniently should make it more difficult to collapse the shaft, as you need to spend a lot longer at mismatched speeds to achieve that, at the expense of more line drag.
Without the tethers you’d end up with a polygon with the same number of vertices as kites I think. To prevent breaking connectors I’d use live hinges instead of rigid connectors, although maybe for a triangle you wouldn’t need to.
I don’t remember seeing recent videos where you show the polygon rings, maybe those work at this scale. I remember thinking the rings wouldn’t survive very long even at this scale from all the flexing.
If you were to go for a larger ring, I’d go for a bicycle wheel construction, maybe add a tensairity ring, which could scale more I think. But at that point I’d sooner drop the airborne part I think as you’d hopefully have a cheap and light rotor you could attach to any wind turbine.
Assuming the use of the back bot and now gliders connected together like I describe above, you would use the lifter kite to lift everything up and preload the shaft. Then you would slowly start spinning the shaft and let centrifugal force expand the shaft. Because you now have two tethers going through the wings, they stay at a fixed bank angle relative to the shaft helping them to catch the wind. Perhaps you would also need to pre-expand the shaft from both sides, or only the bottom side, or maybe the rotation is enough to fix any potential tangles and expand the shaft.
You could of course add as much complexity as you want… I would put the generator on a tower for example…
@Windy_Skies
I’m really struggling to understand where you are steering this discussion
How many threads do we have to tether this conversation to for efficient effective learning and common understanding?
So many of the points you just raised seem minimally relevant in the design of kite turbines
Saying “one” instead of “you” feels outdated. In the the first comment I did mostly mean “you,” in the second I mostly meant “one.” That comment was me thinking out loud, which I didn’t want to do in your topic and was more on topic here. My comment in your topic was on-topic though I think, so I put it there. I’ve now moved both comments here, with your replies.
In the first part I was thinking about rotary MAWES, mostly using bridled, possibly controlled, gliders/kites. Your OM stack falls within that. In the second and third part I was thinking about the ways to scale a rigid ring and the limitations of that, and on one way to launch a tensile torque shaft with the limitation that you can’t reel the lines in or out and that the gliders are not controlled.
You have a tether going through the inner and a tether through the outer wing in a glider that go from the ground station to the lifter kite attachment point, let’s call that the inner and outer bridle, and a tether going between the nose and tail between each glider in a rung, let’s call that the polygonal bridle, which is going to be slack whenever the shaft is not expanded.
You could increase the tension in the polygonal bridle by some function of the sine of the shaft elevation angle and the glider’s weight, when the shaft is not rotating, by doing the following: A polygonal bridle section is first connected to, say, an inner bridle, then enters the inner wing of one glider going around that bridle, is routed through the glider to exit at the the nose of the fuselage, enters the tail of the next glider, exits at an inner or outer wing of that glider, and is finally connected to the bridle of that wing.
When the shaft is not rotating the gliders are suspended from the connection point and the polygonal bridle. The sections of the polygonal bridle between consecutive bridle lines make a rough U shape, with tall sides when the shaft is not expanded. When the shaft starts rotating the tension in the bridle first decreases while the lift of the glider is lower than the weight of the glider, and then increases again as the lift becomes greater than the weight and now the polygonal bridle sections make an upside down U shape, with the lengths of the sides and top of the upside down U being some function of the relation between the different forces.
This ignores the centrifugal force from the rotating shaft and gliders. That force is partly or fully counteracted by the tension in the bridle lines from the lifter kite and the lift from the rungs of gliders above the current one. If that tension is greater than the centrifugal force from the shaft, the shaft doesn’t expand much and you still have the risk, although much reduced, of tangling lines.
You could reduce this tension by adding a central lifting line that goes through the center of the shaft from the ground station to the lifter line attachment point. If you add a winch to that line you can vary the relative tensions. If you add the central line, the winch is probably mandatory as you can’t do rotary launch while the bridles lines are slack while the shaft is not expanded because it is not rotating.
You could add control surfaces to the gliders or attempt ground control.
I previously wrote about earlier and different versions of this idea. See the first point in my first comment in this topic why I now think this version of the idea has limited usefulness; this would not allow for automatic launch and landing of the system by reeling the tethers in and out, and with that have limited scalability, or need a bigger footprint to suspend the tethers horizontally along the ground while not in operation.
An alternative to clamps might be something like this, although to me that looks worse, heavier and more complex and much more draggy, than using clamps. Maybe it still needs winches and clamps to avoid slack lines while the shaft is folded in: From Paper to Bionics: Origami’s Incredible Impact on Science | FD Engineering
The shaft would start as a folded in helix, for example. You would start the rotation of the arms of the ground station, that would allow the kites to also start rotating and catch the wind. You then let the kites rotate more quickly than the arms of the ground station, which would unfold the shaft, in theory. You would probably need winches to fold the shaft back in.
Or there’s this:
The interfaces between different dominoes could look a bit like those of the wing sections here:
Where you mentioned folding
and the video had leaf mirror folding deployment patterns
there’s a similarity with the other video you linked with the string toy… It also has at the end
A folding carnival crown toy
That looks more like one possible key to larger scale rigid ring unfolding of a turbine rotor
A folded crown rotor would be depowered
An unfolded one would be very powered up
The design skill would be do you attach the blade at the single pivot point or across the dual expanding pivots for more rigidity (might not be necessary with bridling)
There’s the question maybe if you can control your shaft with a rigid rotor, or support the extra weight from a relatively heavy shaft and rotor. It’s like attaching an autogyro to a tether and powering it from the wind, but instead of the rotor pointing mostly up, it now is pointed mostly downwind if you can find a way to angle it up a bit relative to the shaft, or perfectly perpendicular with the shaft if you can’t. So you’d then have to build a significant bank angle into the rotor, I think, and do cyclic pitch variation and/or control surface deflection, to increase the vertical lift at the top of the loop. You’d compare the extra vertical lift you’d get from that at your desired cut in speed to the weight of the system, and add some significant safety margin to that to reliably keep things in the air, and also take into account system drag and desired tether tension.
Easier to start with a rotor where you can do both that and also cyclic roll variation, but maybe also uses a bridle for the weight saving. Maybe you can do that with blades on a ring, but at that point you’re adding so much control that you have to wonder what the point of keeping it rigid is.
I don’t think this folding crown makes for a very good collapsible rotor. You’d attach the blades to the two points that come together upon expansion, for the shorter cantilever arms and the assumed easier control from the two fixed points, but now you can’t expand the rotor as now those points can’t come together. Attaching the blade to the single point doesn’t give you the benefit that connecting to the two points give, and also still gives you the drawback of using double the number of rods that you want, so then you’re better off choosing a different geometry that does give those benefits. A quick example could be a ring that doesn’t use this scissor mechanism, but is just rods or dominoes in a ring connected with hinges that pivot. The blades could be attached to fuselages with two longer pivoting rods between consecutive fuselages. Or if you use the dominoes from before you could use the same post-tensioning trick here. That would probably also allow you to expand the shaft with the expanding rotor instead of the other way around and make a complex, rigid, rotor, to which you could add control surfaces.
If you want to make a complex shape then the question is probably what shape do you make the mating surfaces of each domino and how many channels does each domino have, and how do you design the shape so the lines going through the dominoes do as few wraps as possible to minimize line friction.
Thanks Pierre
The way I looked at it
The opened crown rotor has the blades set more flat to the plane of rotation
The crown rotor compression action banks (rolls) the blades to be flat to the shaft
All this of course plays havoc with bridling
But maybe
For the coiled/uncoiled helical shaft idea you’d maybe use a channel and mating surfaces for the coiled state and a channel and mating surfaces for the uncoiled state. Assuming you can do no more than 4 or 5 wraps before the friction inside the dominoes becomes too much, or you’d have to use more motors along the length of the shaft, the length of the uncoiled shaft would be optimistically limited to something like 5 times the circumference of the ground station rotor, so perhaps 150 meters for a 10 meter diameter rotor.
If you don’t use these internal channels to coil and uncoil the dominoes, instead using the kites to unreel the tethers from a drum for example, that particular limit probably goes away.
Ignoring the shaft, a nice image of a ground station with segmented blades would be like a weeping willow when there is no wind and then when the wind picks up the branches slowly stiffen, start rotating, and take off. Or they don’t necessarily need to take off. Or maybe the image of a flower bud opening is also good.
Also for transforming or folding wings for example. You could have a motor that tensioned a number of lines when it rotates one way, and tensions different lines when it rotates the opposite way. Or it can just tension and untension lines. You’d probably use a latch so that it doesn’t have to be holding the tension constantly.
To increase the compression between the dominoes discussed above and here: Tensioned soft shaft, but now made semi-rigid with dominoes for example, you could use motors with gearboxes at various points, or in limited cases you could maybe only use gearboxes, if I understand the physics of that correctly.
You’d have your slack structure sitting atop the ground station. If it keeps sitting atop the ground station even in operation, you can just use motors in the ground station to tension the lines in the structure. The ends of the arms of the ground station act as the stoppers. If not, and the structure is meant to go airborne, you’d need a stopper on each line to prevent the structure from going slack again from the unreeling of the lines.
That stopper could be [1] a clamp in the bottom dominoes, clamping the domino to the line, [2] a motor with a drum in selected dominoes, keeping the tension in the lines that the motor acts on, or, I think, [3] a gearbox in the bottom dominoes, multiplying the tension in the line coming from the ground station to the gearbox by the gear reduction of the gearbox, and dividing it by the number of lines coming from the gearbox going into the structure.
I’d like to see experimentation, modelling, diagrams, performance data etc of the “dominoes” before being able to comment on their likelihood of being integrated into an AWES. I think I know roughly how they’re meant to work. ( Internal tension pulling beams together. ? ) The closest analogue I can think of is tent poles.
Which aren’t far off what I used on kite rotors previously
It is an application of post-tensioning. A well-known example is post-tensioned bridges. In this case the tensioning cables would be dyneema, which leaves the material and design of the compressive elements, which are ideally as wide as possible in the direction of the main force. For wings a thick a wing as reasonable, with the tensioning cables mostly along the underside, for shafts as long a chord as reasonable, with the tensioning cables mostly along the trailing edge. Maybe for both bracing between neighboring elements. Maybe you’d use a genetic algorithm for example to minimize drag, weight, and number of wraps, and maximize lift and buckling resistance.
My previous comments about this were mostly just brainstorming. I don’t think I gave an opinion on the viability yet.
We don’t have enough information to make conclusions, but my preliminary opinion is that for torque transfer you only want to use these fairings to resist the torque, and not any gravitational or centrifugal force, as that is for the tether tension. I think that means thin airfoils with a longish chord, and the thickest section very close to the leading edge to have enough cross-section there to resist compression. You can then analyze or test that, does it increase the torque transfer capability enough that it more than makes up for the drawbacks? Testing it, like I say in the other topic, can start out simple: make a few sections and test to failure. The folding/unfolding idea I don’t think makes sense as you’re adding weight and complexity that is not useful in production. I think this idea is probably less viable than adding compressive rings, possibly constructed in the same way.
For wings, if you think it makes sense to make very long wings, which I don’t necessarily, it could make most sense. For shorter wings it could make sense too.
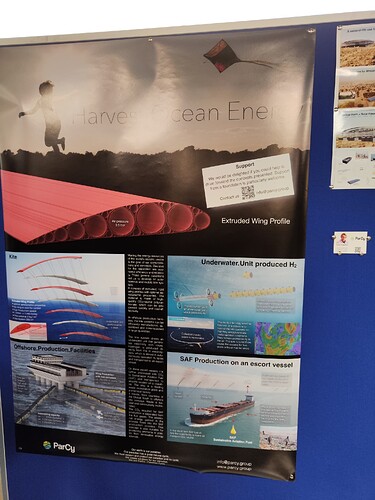
One design could be for example a bridle line every few meters, like the poster I linked to before, mimicking an upside down suspension bridge, and then this construction method mimicking a post-tensioned bridge.
One of or the lightest beam possible is a tensairity beam:
You could use a tensairity beam as a spar and then surround that with these post-tensioned compressive elements. Or you could design these compressive elements to withstand some internal pressure and use an inflated bladder as a core.
The goal with these ideas; thicker wing, bridling, internal spar(s), is to lower the compression needed as that is the likely limiting factor in the strength of the wing; how do you make wing sections that can withstand lots of compression and are light.
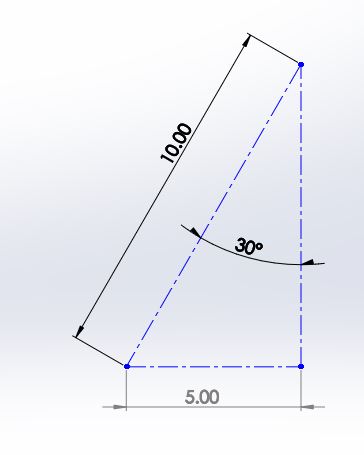
This quote now is incomplete/wrong I think (and also I should have said “while ascending/descending” where I said “at the top/bottom of the loop”), see the triangle below.
In a shaft with 5 meter arms and a 30 degree elevation angle, you’d have reel the tether in and out 8.7 meter every revolution, if you want the plane of rotation to be perpendicular to the elevation angle.
If you want to do torque transfer, the shaft now looks like an ellipse close to the ground, with the minor axis in this example being roughly half that of the major axis.
Looking at the sketch, the 26.99 is interesting for a different reason. Here is a different sketch:
This shows that in a concept like the Pyramid if you have a 30 degree elevation angle and 5 meter long arms, and the plane of rotation is perpendicular to the elevation angle, and the kites also fly in a 10 meter radius, your kites move 5 meter downwind and 5 meter upwind during every rotation.
I think that means while the kite is descending, you subtract 5 meters from the wind, and while it is ascending, you add 5 meters to the wind. I am guessing the experienced wind speed would be a sine wave and the 5 meters added or subtracted would be the area under the curve. The height above the x-axis of the wave would be the actual wind speed seen by the kites.
In this example the amplitude of the wave is 15.7 m/s, so the kites would see a variation of 2 times 15.7m/s in wind speed throughout one rotation.
Is my thinking right?
You could make the arms rotate about a horizontal shaft to eliminate the effect the arms have on this, changing the tensile shaft shape from a rectangle to a parallelogram, to leave only the effect the elevation angle has on it if the kites fly in a larger radius than the arms. Or you could tilt the arms in different directions to help with gravity slowdown and perhaps also steering, instead of or in addition to the cam idea. Tilting the arms probably affects lots of things, like torque transfer ability of the shaft and adding cyclic loading to the arms.
This variation in wind speed the kites see would be due to the plane of rotation of the kites, the period of the rotation, and the radius the kites fly at, and would exist whether the ground station had arms or not. If the speed of the kites around the circle is not constant, the shape of the wave would no longer be a sine function.
You’d probably want to shape the wave. You’d want the amplitude be higher the higher the weight of the kite and tether. You’d want to translate the area under the curve or the amplitude to energy added or subtracted to and from the kite/wind. And you also want to take the reaction speed and aerodynamics of the kite in reaction to the changes in wind speeds into account. In my example if my thinking is right and the kites see a 32m/s wind speed difference every second, they shouldn’t be able to respond, the inertia from the weight of the system will prevent the kites from speeding up and slowing down fast enough… I guess that’s how that works.
It’s a similar problem to (tethered) autogyros and helicopters flying at some significant percentage of the rotor’s rotation speed, where the advancing blade sees a higher velocity air than the retreating blade.
Anyway. Some possible equations. You want to know the distance the kites move upwind and downwind amongst other things. Let’s call that d_x. Wind velocity is v_w, kite velocity is v_k. Kite velocity moving upwind and downwind is v_{k_{d_x}}. Elevation angle is \theta. Kite flying radius is r. The circumference of the circle the kite describe is c.The time it takes the kites to go around the circle is p, half that is \frac{p}{2}.
d_x = 2\ r\sin \ \theta c = 2 \pi r p = \frac{c}{v_k}, \frac{p}{2} = \frac{c}{2v_k}.
The kite speed should probably be a function of the wind speed, let’s call that the tip speed ratio, tsr. v_k = v_w \cdot tsr
So in this example the kite sees a wind velocity from -15 m/s to 35 m/s.
Let’s use a new variable name for this, let’s call it “effective,” wind the kite sees in the upwind/downwind direction v_{w_{effective_x}}.
Now I think you can use this variable to calculate total power and variation in power available in the wind: Power\ (W) = \dfrac{ρ \cdot A \cdot v[_{w_{effective_x}}]^3}{2}.
Do you think this is right, or did I make mistakes somewhere?
Great to see diagrams presented to help explain the configuration
I’m Not at all sure yet on correctness.
I’ll still have to spend a lot of time picking over the details to make sure I understand the configuration.
But I am interested to help you envision, model and develop the ideas here.
My skills in 3d modelling and mixed media may help you neaten a fully accessible presentation of this
Do you want to set up a collaboration environment for this?
Thanks, I’d like that. I could just start a topic here or in a restricted forum category to keep it simple and low pressure. I’d occasionally post there if I have new thoughts on it or if I made some sketches or calculations.
My interest for that topic could be in increasing my understanding of your and Tallak’s work, and if I or third parties agree with it or can improve on it. I want to see if it’s not overly optimistic. I also want to understand the kite and shaft dynamics better.
I’m also interested in this yaw misalignment question. That’s probably reasonably understood by some people, it’s just that does not include me at the moment.
Looking at the drag and weight of different compressive rings/rotors designs is also interesting I think. I think that’s also a good learning vehicle to learn to model drag.
For now, I still had 2 replies to this topic that I was slowly drafting.








{kind=link}