I’m a big fan of Nicholas Rhem and his software
Many AWES utilise a flight regime transition
Are any of them as well designed or explained as this ?

I’m a big fan of Nicholas Rhem and his software
Many AWES utilise a flight regime transition
Are any of them as well designed or explained as this ?
People at MIT are working on this:
https://aera.mit.edu/projects/aerobatic-maneuvers-for-fixed-wing-vtol-aircraft
A video by them:

Aerobatic flights and all the transitions seem so simple when there is no energy generation as such and no tether.
So true
Bridles and tethering add a lot of complexity to the system control
Yes. And multiplied many times over if fail safe is to be considered.
I was looking at this and good news is that its quite easy to control a tailsitter. I don’t really get to engaged in the roll becomes yaw discussion. Maybe just need to rethink stick mapping. I mean, people do already hover with «3D model planes». Maybe just a matter of pilot skill rather than fruitful R&D material. Anyways, for AWE the problem is moot because a computer pilot will not care
said the wind turbine… ![]()
I reckon we need could start a Nicholas Rhem fan club…

A giant RC rotor with 12 tip and leading edge props at
Flite Fest
Our man Nicholas Rhem again

 - Part 2")
Some reasons to put those last 2 videos in the chat
Tip prop powered rotors are efficient to launch
They have good control
They can lift a tether
They can be powered by a tether
They can kite (Bridle the wings and use as an autogyro)
Anyone reckon they can be useful as an AWES lifter?
To sum up, they can be an AWES.
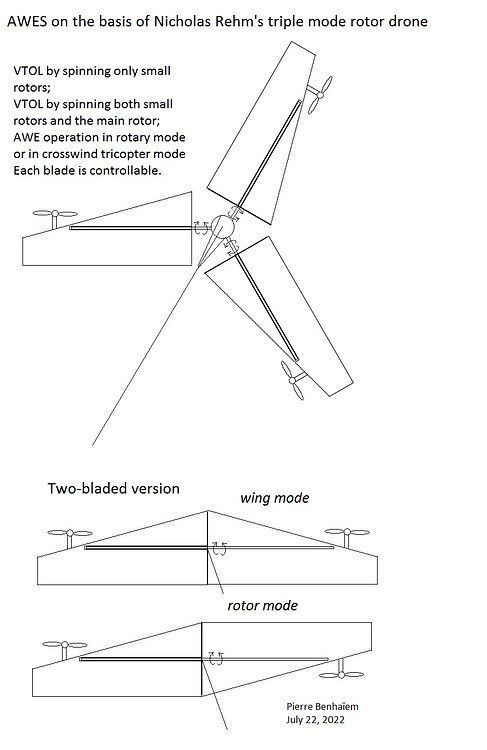
See also the discussion related to this topic: The Spinning Drone Paradox where the sketch above is taken from the comment linked also above.
For using an assymetric foil on the wing blades, the rotation should change from clockwise to counterclockwise when going from takeoff to production. Alternatively use morphing wings or take off with the foils upside down.
I feel this whole concept is a little bit sidetracking from current state of the art of understanding AWE. For instance, much of the wing area is placed close to center of rotation while I expect it is better to place that material closer to the wingtip.
The props at the wingtip will be bad for aerodynamic efficiency while in production. So maybe they should be folding blade props? Otherwise noise could be an issue, as will be selecting the prop pitch for a wide variety of inflow airspeeds on those props.
This could be a good design for a lifter drone, though even there I worry that such a design has issues in keeping the load still (not rotating) and hard to make redundant.
Maybe if the concept for such a lifter drone was evolved, it would turn into a helicopter?
I’ve seen this mentioned a few times, but I still don’t understand it. If I understand things correctly, a kite or airplane takes off with the nose and the wings pointed up some, being pulled forward by the propellers or the tether, then when it is pushed against by the wind, the nose and wings need to be angled down a bit from perpendicular relative to the tether, so the wind can push it forward instead of backward.
If that is correct, you would need to change the angle of attack of the wings, you wouldn’t need to reverse the rotation?
Or is this about flygen where the rotors on the generators would first have to act as propellers and then as wind turbine rotors?
When the aircraft is acting as a helicopter, the air is flowing through the swept area of the propeller from over to under. When acting as a wind turbine, wind is flowing from bottom to top. To the wing profile should be flipped 180 degrees. Alternstively use a symmetric profile, but probably such a design choice will later prevent you from achieving some competitive LCOE because the force generated will be quite a bit lower.
If you flip 180 degrees by rotating the blades, you also need to change the direction of rotation (leading and trailing edge swap places)
I will see if i can make a sketch, no time right now
Indeed my blades rotated by their trailing edge! But they were small (0.23 m diameter) and rather “flat” and the efficiency of the fly-gen kite wind turbine using these blades looked to be nice, although this way is unorthodox and likely not recommended for larger blades.
Some previous discussion about this subject:
Surely you only have to change blade pitch a bit in the rotor (just like a helicopter would when in emergency autogyro) to handle the difference with flow changing direction… Rotation direction and blades stay the same.
Maybe I’m not understanding the frame of what we’re discussing here
Maybe I’m wrong but I thought
E.g.
Pyramid or Daisy types with powered leading edge folding props for VTOL
Would still turn the same way as when working as kites
With the same blade assymetry (larger topside)
Just zero pitch from bridle tethering so that air going through encourages rotation and lift
Thanks. I’ve tried, but I still don’t see it.
This older quote for example:
To me the two paragraphs seem to say mostly the same thing: both are generating the majority of their thrust in the same direction, (the direction you want the resulting force to pull, and downwind), and both are rotating in the same direction and have their airfoils oriented roughly similar, with a small change in angle of attack.
The only difference I see is that the wind turbine rotor gets its power from the wind so it needs to pivot its blades to take advantage of that, and a propeller doesn’t need to. A wind turbine rotor is like an airplane always in a dive, a propeller is like an airplane always ascending, maybe.
If you wanted the install a wind turbine on an airplane, you’d point it so it generates its lift pointing backward. If you wanted to install a propeller on an airplane, you’d point it so it generates its lift pointing forward. I think. That is I think different.
You guys are so lame. He was talking about a pitched propeller that could act as a propeller turning in one direction, and a turbine turning in the opposite direction, while staying at the same pitch. if optimized as a propeller, it would suck as a turbine, and vice versa. If it was primarily designed as a turbine, you could “force” it to function as a very poor propeller by running it backwards, if you put enough power into it, maybe only for short duration to get airborne before it overheated the motor. You could try to compromise the design to coax it into acceptable performance as both a propeller and a turbine, but in my experience, the results would be lacking, as I found in a research project even just trying to get decent turbine performance in two directions. In that case we had issues with neutral camber (trying to please all people you end up pleasing nobody) and leading edge geometry vs trailing edge geometry. The biggest problem with the idea under discussion here, is a good trailing edge looks nothing like a good leading edge. Possible, yes. Good performance in both modes? unlikely.
Thanks @dougselsam yes, I see the confusions across the directions of this thread now.
So, Can I just check we’re all still in agreement (with my personal biased obsession and steering)
That if we have a kite rotor with one fixed pitch (for the sake of simple bridle operation), which we want to use as a VTOL and as a kited rotor, …
and we have the option of adding a small motor and folding prop to add torque to our rotor for VTOL,
Then a zero pitch asymmetric main kite rotor foil can work for both
given
if we have only short blades at one location relative to the hub, they should be far out (large diameter)
… All OK so far?
This question is inspired with the dynamics of autorotation in mind, but using the small prop to impart the thrust for VTOL instead of the falling helicopter root and centre blades
e.g. as in this description How is rotor pitch best managed in helicopter autorotation? - Aviation Stack Exchange
arguments against
Getting the rotation speed high enough for VTOL is not going to be easy
Steering the tilted kited rotor once it’s up and kiting is not going to be easy
Promise I’ll avoid biased questions and get out more again