"Spider-Mill" Dynamics (Review and Update) :
“Spider-Mill” Dynamics (Review and Update)
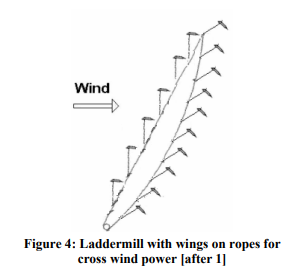
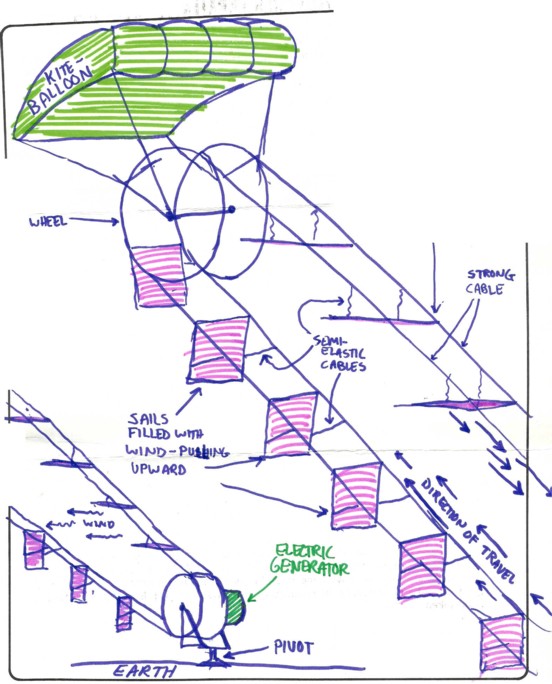
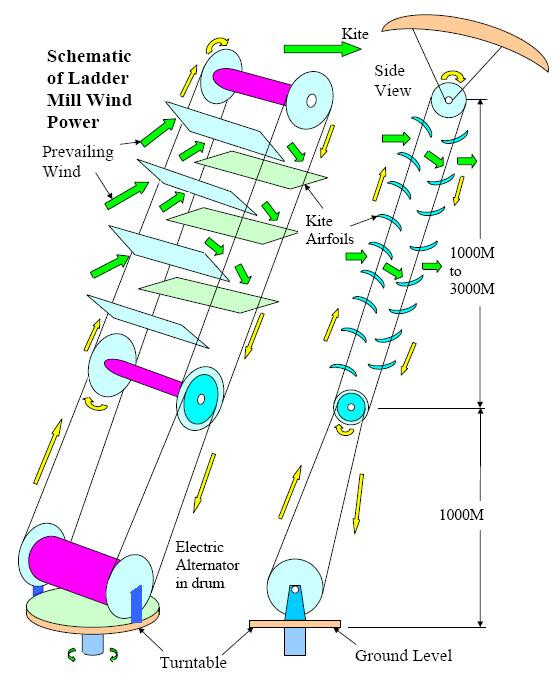
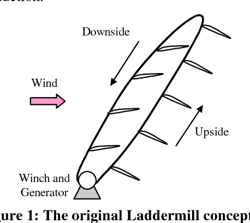
TU Delft (and Doug) early on recognized that a coordinated gang of kites was an essential AWE scaling method. Delft’s laddermill has morphed into a “Spider” concept that Wubbo Ockels introduced to us at AWEC2011. A “Spider-Mill” is rigged like an Inuit dog sled, whereby each kite along a common gangline is free to sweep or not, depending on the power pumping phase and windfield structure. Pairs of opposed kites orbiting a mainline were studied by Delft as a means to avoid much of the line drag of single sweeping kites.
During this period i was learning hands-on about classic kite trains under various masters and was honored to help Terry McPherson fly a record 39 fighter kites from one line. These flights were existence proofs that a bunch of marginally stable kites fly well together, showing “aggregate stability”. Wubbo asked for the video link (below) to this sort of kite train and his reaction was “fabulous!”. Physicist and sci-fi god, Rudy Rucker, tweeted rapturously about the “sky seething with chaos”.
We see in these flight dynamics an amazing embodied computation whereby kites “in parallel” solve complex trajectories across chaotic turbulence in real time, for stable static force. To tap these kites as a pumping energy source minimally requires a simple control signal, much like the rowing coxswain’s “Stroke!” call, to coordinate the pumping of the gangline, and each kite needs a variable AoA servo input to power up or down, according to its place (phase) in the pumping rhythm (phase space).
For Spider-Mills, the common mishap is for a kite to collide with the tether or another kite. Opposed kiteplane pairs especially are challenging to perfect, owing to higher inherent potential for collisions and unrecoverable fouling. Staggered single kites on tri-swivels, as classic kite fliers rig, recover from temporary fouling and the danger of kites directly colliding is resolved.
With small trains collisions do no damage, and its practical to ruggedize contact points as the scale grows. At some point its worth avoiding contacts with active “chaotic control”. Unlike brute-force control, chaotic controllers work by nudging unstable elements away from failure states. When a kite wanders towards the gangline, a small correction is all that is needed to veer its orbit clear.
A tall spider mill does not necessarily power up and down all at once, but can send pulses of tug traveling down the gangline to the base. A staggered rig naturally supports helical power waves moving down the line. Each kite along the gangline acts in phase to the common clock signal.
The ultimate Spider-Mill may well be assembled and disassembled in mid-air by docking kiteplanes, but the paradoxical problems of large kite arrays laid out on the surface, prone to cascade-launch from any sub-unit, are spontaneous array launch risk and required “killability” (pending topics).
The old McPherson “spider” train video- Record Fighter Kites
CoolIP ~Dave Santos 12Oct2011 AWE4460
Comment and development of this topic will be occurring here.
All, send notes, drawings, and photographs!
Terms and aspects:
Related links:
Commentary is welcome:
I will recite the key points:
Dave Santos 12Oct2011
Delft’s laddermill has morphed into a “Spider” concept that Wubbo Ockels introduced to us at AWEC2011. A “Spider-Mill” is rigged like an Inuit dog sled, whereby each kite along a common gangline is free to sweep or not, depending on the power pumping phase and windfield structure. Pairs of opposed kites orbiting a mainline were studied by Delft as a means to avoid much of the line drag of single sweeping kites.
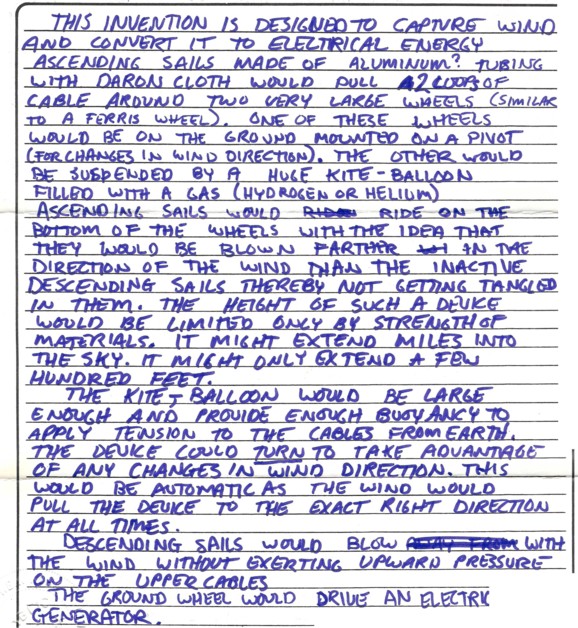
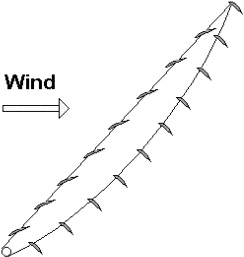
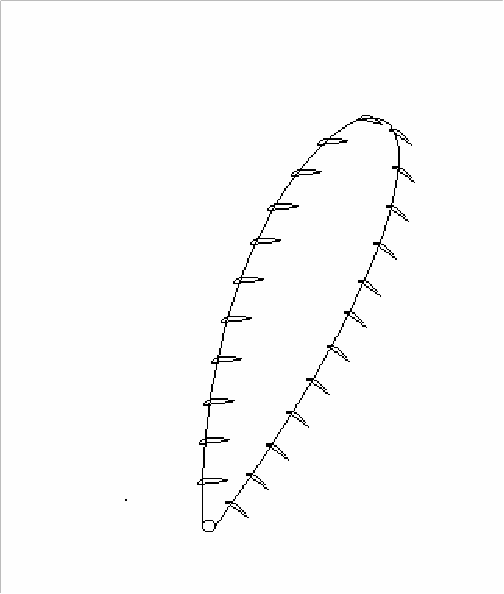
There is no doubt: what Dave Santos described in 2011 by using the term of “Spider-Mill” is consistent with what I have sketched (“pairs of opposed kites orbiting a mainline”), and with the single “swinging” wings" version of the Laddermill shown in figure 4 of the publication I just referenced, using the same term of “Spidermill” with another spelling, both being crosswind kite devices in Laddermill configuration.