Great to see a new multi kite rotor configuration being tested.
I hope you get some good backing for your experimentation Jean-Sébastien.
Rotor expansion is something I’ve been keen to see tested.
The expectation I have being that expansion enables, easier deployment handling, with a dense deployment form, which then leads to large rotors in operation, with minimal mass, and max speed. That’s got the potential for a big step up in efficiency.
A hell of a lot to prove but - Nice start
Very impressed that there is no lifter.
As an aside - I’m still considering using a static lifter as the initiator for chained dynamic lifters.
Can we presume this test was being flown from a mast just off to camera top left where the tethers are all headed.
I can’t quite suss out what mechanism actuates the extra line length for expansion…
Would love to know more too
I presume the intent is to move toward yo-yo / phased tugging
They will probably need a lifter kite for lunch and land. In yo-yo mode, during wind gusts, sudden retraction of the lifter kite might prevent the system from falling to the ground.
Hi Rod:
No visible lifter.
So what are those suspension support lines going up to, a structure?
From what other source have we become accustomed to seeing 2-second “blink-and-you-missed-it” videos?
As stated in the video, there is “No roll control” because of “Fixed bridles”. But there is pitch control. Indeed this device works like a rotor and is a rotor. And a rotor (for helicopter for example) is controlled by the pitch (including collective pitch) of the aligned blades, and not by the roll. So there is an active control.
Like any controlled rotor, lift is ensured by pitch control. So there is no need for a lifter kite. And takeoff could be achieved and easier when the two blades are close each other.
It is an extendable rotor. There are two rigid blades which have a low aspect ratio, and whose shape is very simple.
It could be used in yo-yo mode, but also as torque transfer device in a simplified version of the The Pyramid, perhaps as flygen device with secondary rotors settled in the respective external wing chords.
It looks like a brilliant idea and a preliminary achievement. We wait for the sequel, or we make it happen.
About “Passive Cyclic Control Device for Helicopters”:
Sounds great Pierre, as our imaginations fill in all we don’t see, but what are those upper suspension lines suspended from, in this 2-second video with its limited view?
A comment from the author:
“Thanks for sharing! There is a lifter off the picture. The idea is to take off as a spinning drone in the future but we are not there yet.”
I do still see new sign ups in the last couple of days, but none that were activated in the last two months, which probably means that they also didn’t get the activation email. Does anyone else still get emails from the forum? @Lukas or @tallakt could look into this.
I’ve activated his account now.
Note that until this is fixed you won’t be able to change your password either.
So this is an interesting question as no roll control vs roll control is tricky to analyze.
[1] Are the kites aligned [roll wise] in the plane of rotation, or are they fixed at a roll angle defined by the bridle?
[2] Could the kites be held airborne without a lifter if they are pulling only horizontally?
I think [2] is quite clear that if the force is only aligned along the axis of rotation, the TRPT rig would never elevate from zero degrees, even if the lift force of the kite was varied over the full cycle. In short, force balance dictates that the kites would fall to the ground. One can use moment calculation and assume the whole soft structure is stiff due to tension, but that will not be a good assumption, because there is no force to keep the bridle between the kites taught.
So we would be discussing here some version of [2]. I would agree that this is possible. But, it would be a system with a lot less design freedom compared to a similar system where both roll and pitch [lift force and drag] were controllable. I would argue that a system like this [2] can only be proven to work in a very narrow window of operation, but for practical use, we would need both roll and pitch control. Whether or not we also would need yaw control is harder to know, I expect also being able to control yaw would make some things easier.
I do think for this particular problem, you need to tackle the full problem head on, or else it will be quite disappointing in terms of performance results. I am not trying to suggest that Mr Brouillon’s rig is not an impressive accomplishment, just saying I think its just a small step on a ladder.
@someAWE_cb tries to do something similar. He instead uses a rigid rotor where he does cyclic pitch variation. I don’t think that and this will work without a built in roll angle to allow the pitch variation to result in force variation perpendicular to the axis of rotation.
Your video is difficult to analyze. Is it sped up, and how are you doing the pitch variation? Now it seems to do one rotation in a fraction of a second. One wonders if the kite will be able to change its pitch fast enough, and about the slow down of the kite at the top of the loop from the extra drag resulting from the higher angle of attack, and its weight. Tallak for that reason uses 3 kites that he connects together in his Pyramid concept.
And how are you doing launch and landing?
If you are using lines or motors to control the pitch, you could also use the same to control the roll angle? Would it be easier and quicker to control pitch angle or roll angle, and which would result in more control authority?
@tallakt I can’t follow your numbering, or maybe you made a mistake somewhere? I’d do something like [1] no fixed roll angle, [2] some fixed roll angle, [a] zero elevation angle… […] percentage of stall speed… […] centrifugal force…
Congratulations for both your test and device, which seems to give rise to a first in-flight view of such a device.
If you have the opportunity to provide additional information, please do not hesitate.
In the meantime here is a device (from Bladetips Energy ) that might perhaps have some similarities (in addition to other mentioned devices), but only a rendering is shown in the video reproduced below (see from 0:43, where I started this video):
They are rotating the whole AWE axis of rotation I think, to generate lift force.
I edited my numbering scheme somewhat to make it more readable. there is just option 1 and 2, i guess tilting the axis of rotation would have been [3]…
Hi everyone, thank you for all the positive and constructive criticism! Sorry that I could not answer earlier. I did not expect to get that much attention, the video was mostly meant to explain my peers in the control community how I intended to control that seemingly complex system.
Thank you all for sharing the similar past inventions. Although I was familiar with some of them the breadth of knowledge is very helpful. I think what really sets this system apart and why I am pursuing it is the possibility of using bridles without reels to actuate them all. Similar to bridges, where past a certain length the road must be supported by cables or regular pillars, when I crunched the numbers, I found that supporting the wing’s structure is the only thing that makes economical sense at scale. I’m sure you know that there are some very nasty square-cube laws.
I would also like to answer the more negative points to avoid any misunderstandings.
@dougselsam I apologize for the shortness of the video, I live in Switzerland and it’s not exactly known for its strong wind. Tuesday was the highest speed predicted and I had to catch a gust, which died soon after, to actually get it started. Now the forecast is back to 5km/h for the foreseeable future, at least in easily accessible places.
I also did not mention the lifter on the post since I had been posting about my “sky-crane” many times, it was clear to most of my connections how I do takeoff and landing for now and that the lifter is temporary.
@tallakt I also think the video is not very impressive, it was not meant to be. I just tried to validate the assumption that the rotation would be somewhat stable and get an idea of the centrifugal force for that particular system. I’m working with a friend from our lab and he made quite extensive simulations showing that stabilizing it in the air without lifter is possible, but I agree that the kites are never perfectly aligned roll-wise, their angle is “static” for a given steady-state.
Although we started simulations and calculations about a year ago, our earliest prototype dates back only 2 months. There is a long road ahead and hopefully we can show improving results. I’ll try to stay active on social media if you are interested.
@JS_Brouillon , I think a complete plan of the device in flight would be welcome, including the lifter kite even if it is temporary, including also the ground station.
@PierreB I have most of the theoretical details written down in the provisional patent application I submitted in November. You can find it here: Scalable and controllable airborne wind energy systems. Note that most of the contents are background and not new. This is a provisional application so I included everything I could. It will be rewritten this year. The lifter drone (it’s a drone at the moment not a kite) and base station are not included but there are some pictures on my linkedin profile. The “base station” is a simple bearing with two anchors for the tethers, not generating energy yet.
We also have a very extensive simulation framework with dynamics identified from a model plane and tether drag calculations. The renders are still a bit difficult to interpret so I am not sharing them yet.
Remarks on formal details concerning the numbering: from 500 in figure 5, from 600 in figure 6 (which is normal) but respectively from 900 and 1000 in the description on pages 14 and 15 for the same figures 5 and 6, so that for example the element 901 described on page 14 for figure 5 is assigned to another element and another figure (figure 9).
Please what is the meaning of the term “elevons” on page 17? Ailerons? Elevators?
Basically, although they are described, it is difficult to identify the essential elements which define the new solution in relation to the state of the art in spite of the quoted prior art. However the new solution appears very well on the video (fixed bridle and the means for a rotation in extension).
For example the “fairings” are not specific to the invention even it uses them. Perhaps a first draft of the claims would make it possible to better highlight what is new.
The title itself “Scalable and controllable airborne wind energy systems” does not allow to direct towards the main specificity. Perhaps something like “Scalable rotating airborne wind energy systems with simplified control”, then quickly in the description disclosing the means (fixed bridle, increase of the swept area by using the extension of the lateral tether using centrifugal force).
You have to wait for Figure 6 to see the new elements as they appear in the video. Figures 1, 2 and 3 and corresponding texts describe elements which appear to be part of the state of the art, except for elements justified by equations, but which would then find a better place in the dependent claims (other than the first claim).
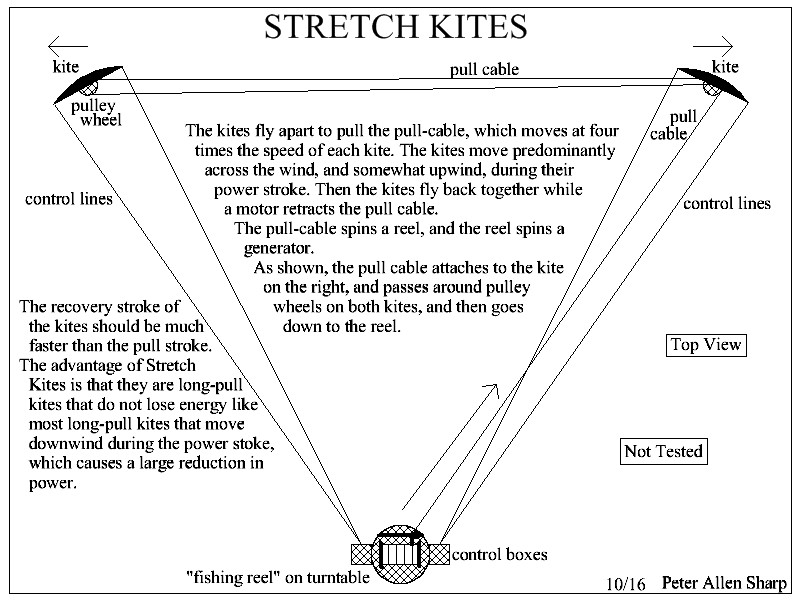
Apart from that, as a curiosity, we can see something apparently similar, but only in appearance. We do find the extendable side tether, but in this case it is used for power take-off (PTO). Stretch kites,
Thank you very much for your feedback! Indeed this is a provisional application to obtain a priority date and be able to share the details with you and others. It does not meet the clarity standards of the EPO yet, but I will ask an experienced lawyer to take care of that. I am working on a more “digestable” document but these things take time to write. Elevons are both elevators and ailerons, i.e., an elevator with independent movement on each side. Having the ability to slightly shift the tension from one side of the wing to the other may still be useful, even if the roll angle stays constant. But I agree this is not necessarily needed so you can just think of them as elevators.
I’ve seen the stretch kites invention before, It is very different because the tether connecting the two kites moves during the generating phase. Our tether is orthogonal to the movement. I am not sure if anyone tested stretch kites in practice since the invention to see if one can gain efficiency using such a pull. At medium to large scale, I can’t imagine the pulleys have a D/d ratio large enough not to destroy the tether after a few days of operation, otherwise the drag would eat all the efficiency away. That is the main concern we try to avoid with fixed bridles. Even Dyneema rope fatigues extremely quickly, but if the reel is on the ground it can be bigger.