This seems to be a bit confuse I think. A nice rendering is not a conceptual explanation. About:
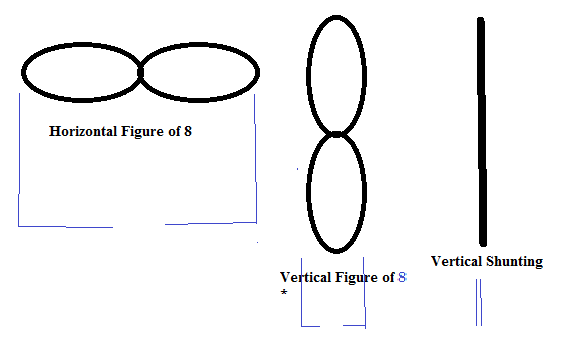
In the bottom of the path, the winds are yet good enough. My 4 m² soft ram wing on the video ascended at full speed immediately after the controlled fall. The explain is simple: its weight is negligible compared to the pull force. Even the kinetic energy due to the fall is low compared to the pull. As an example the weight of my 4 m² kite is 8 N (0.8 kg). Assuming the speed is 20 m/s for the climb as for the descent, the kinetic energy is 192 J, while the pull force is 960 N. The weight/pull ratio is about the same regardless of the size of the kite, or would increase slowly until a critical (?) value which can lead to a huge kite. At worst, a few seconds will be spent on really huge kites, and recovered at the end of the trajectory thanks to the this this time positive kinetic energy during the climb. So I do not see any real problem for scaling in any size. On the contrary, I conceive of this type of trajectory as a means of maximizing the space used, unlike to what results from the figure-eight. And the vertical path, said also 2D (3D being for figure-eight), can also allow the implementation of really small and yet powerful AWES, for example by using a (1.5 kW) 9 m span kite for 33 m tether length.
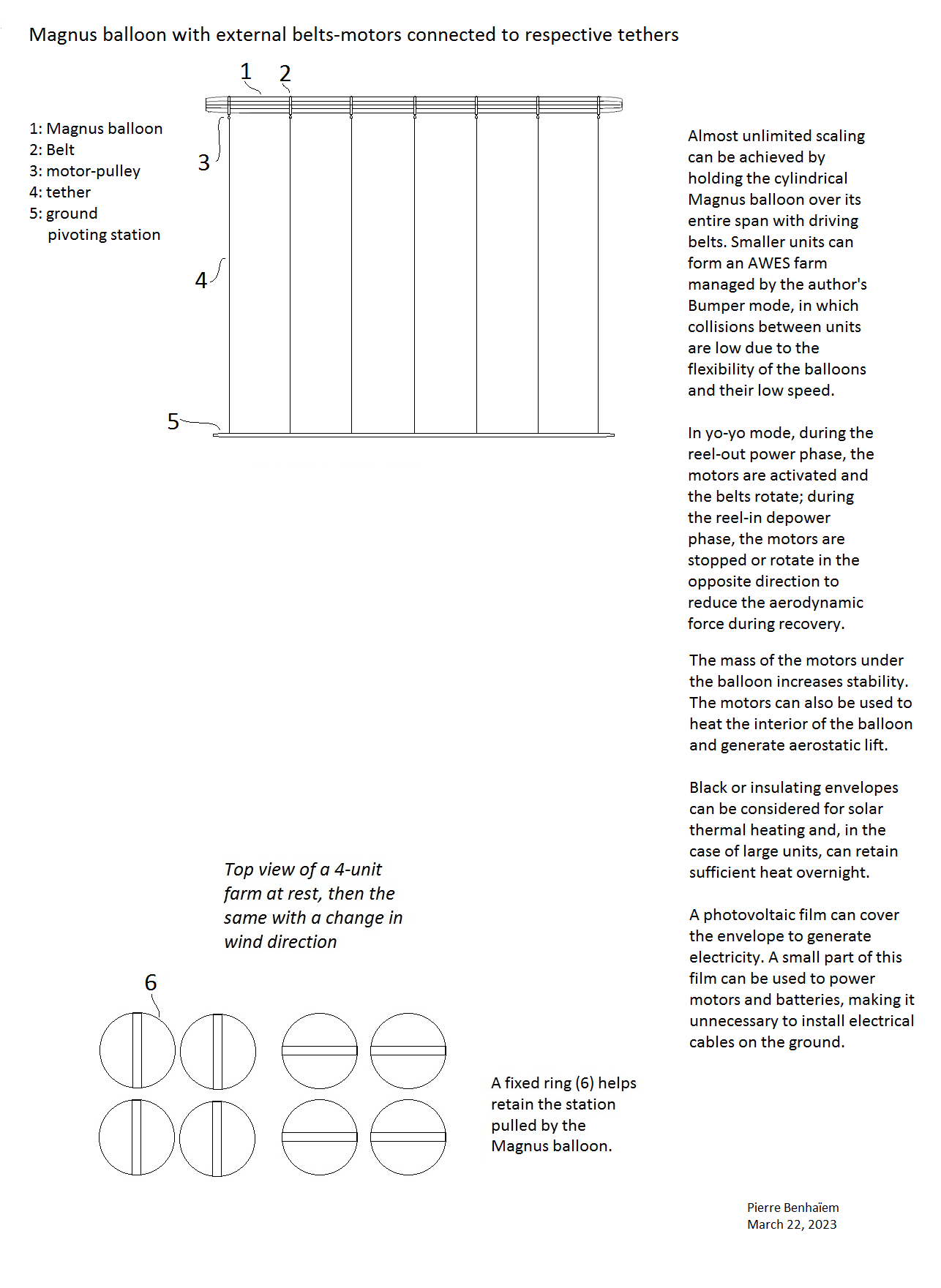
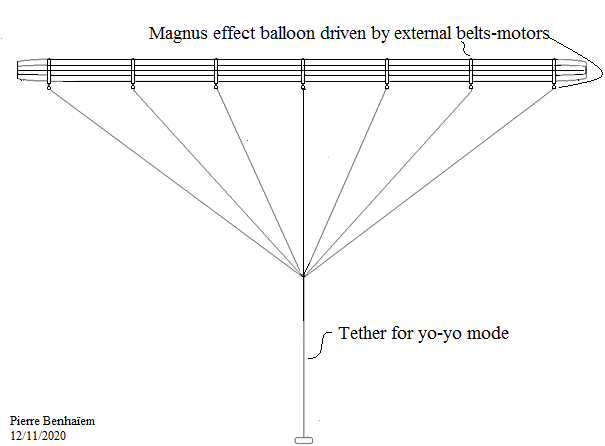
For general information about vertical path as a start reading carefully chapter 12 and chapter 13, particularly the fig.12. 23. on the page 300 of the chapter 12, showing the vertical trajectory and the swept area that is delimited by the Magnus balloon, and also the table 12.3 on the page 297 where the dimensions of the balloon and its mass are mentioned, respectively 80 m span and 50 tons. Certainly it is a balloon inflated with helium, but the mass of inertia plays a role during transitions, and seems to be taken into account by the author.
Concerning the fig.12. 23, the low position is at about 50 m from the ground, so not too close; and the top position is at 220 m from the ground. As the horizontal distance is about 200 m (do not forget we speak about a vertical trajectory), the elevation angle of the low position is about 14°. The elevation angle of the top position is about 47°, leading to a tether length of 293 m, then 87 m for a reel-out/in phase.
If we extrapolate towards my initial example of a 900 m kite span, the tether length should be about 3299 m, comprising the 980 m for each reel-out/in phase. It is a higher value that the value I initially mentioned, but still low compared to the kite span. This higher value results from the requirement to go far from the winches in order to optimize the crosswind flight in a similar way as the papers indicate.
The mass of a single skin kite is far lower than that of a Magnus balloon, and its weight is two orders of magnitude lesser than other lift and drag forces. So the bottom transition may not be insurmountable.

 Milan Milutinović
Milan Milutinović Mirko Čorić
Mirko Čorić